Konfiguration
- Um einen Planar-Mover anzulegen, muss zunächst eine MC Configuration angelegt werden.
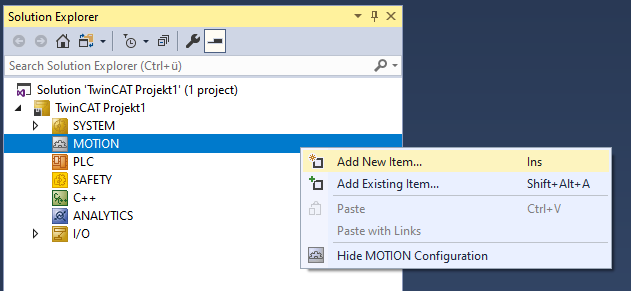
- 1. Wählen Sie MOTION > Add New Item… aus.
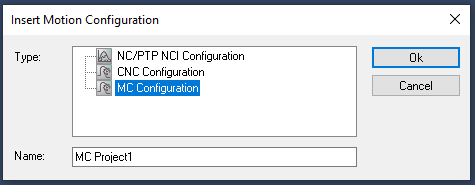
- 2. Wählen Sie im folgenden Dialogfenster MC Configuration aus und bestätigen Sie mit OK.
- Sie haben ein MC Project angelegt.
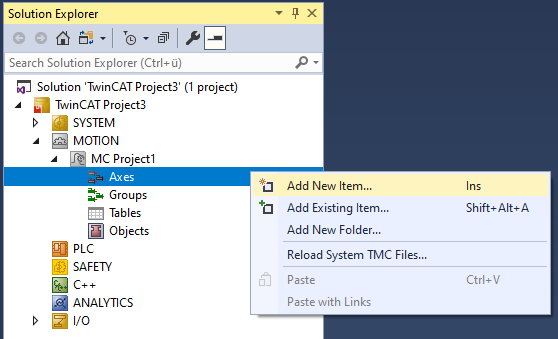
- 3. Wählen Sie im erzeugten MC Project > Axes > Add New Item… aus.
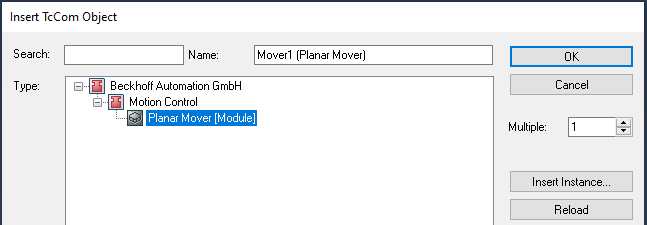
- 4. Legen Sie im folgenden Dialogfenster einen (oder mehrere) Planar-Mover an und bestätigen Sie mit OK.
- Der Planar-Mover ist nun angelegt und kann parametriert werden.
Detailbeschreibung öffnen
- Planar-Mover im Baum auswählen und doppelklicken.
Bedeutung der einzelnen Reiter
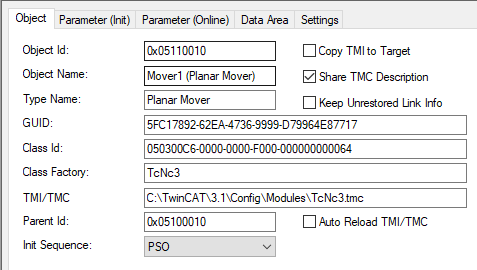
Object: Hier werden allgemeine Informationen (Name, Typ, Id, usw.) dargestellt.
Parameter (Init): Gibt Initialparameter an, die der Anwender verändern kann, um das Verhalten des Movers zu beeinflussen.
 | Parameter (Init) sollte vor dem Parametrieren in den Simulationsmodus ( |
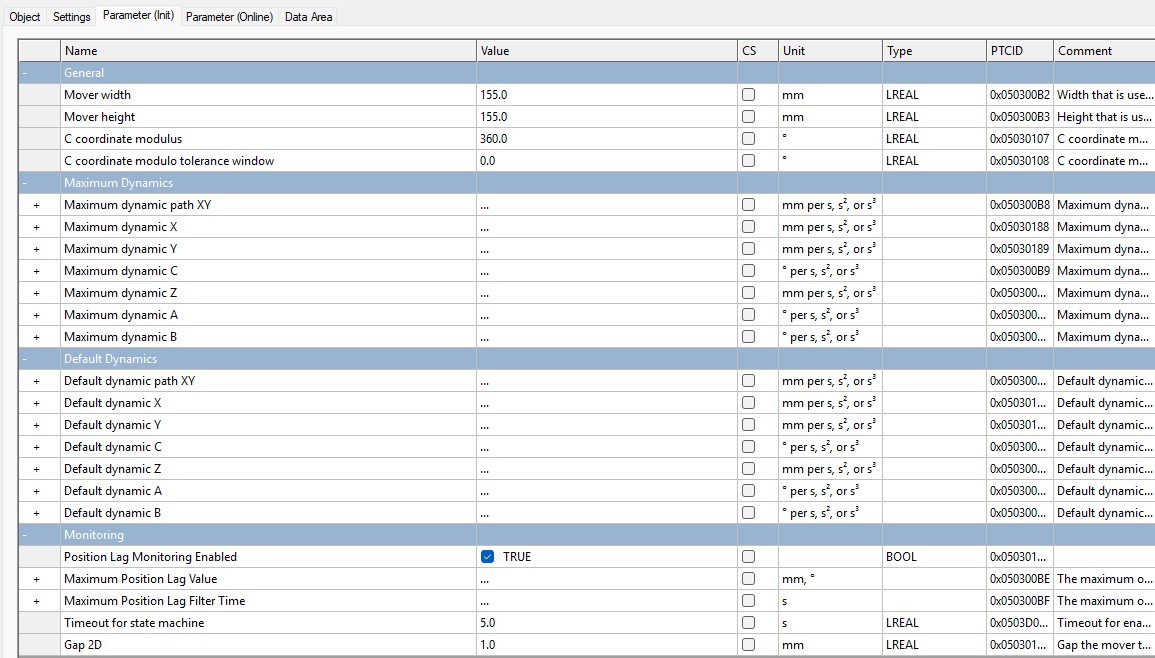
Die Initialparameter sind zunächst so eingestellt, dass der Planar-Mover (fertig verknüpft) mit der Hardware verfahren werden kann. Wenn der Anwender ohne Hardware verfahren möchte, muss der versteckte Parameter „Simulation Mode“ auf TRUE gestellt werden. Im Simulationsmodus sollten die ebenfalls versteckten Parameter „Initial Position“ und „PartOID“ gesetzt werden. Hat der reale Mover keine Standardmaße, so müssen die Parameter „Mover width“ und „Mover height“ angepasst werden.
Die versteckten Parameter „Minimal/Maximal Position“ dienen dazu, für die C-Achse festzulegen, wann der Mover in den Befehlsmodus CRotation wechselt. Für maximale/minimale Werte von +/-45° wechselt der Mover in keinem Fall in den Befehlsmodus CRotation. Für alle Zielpositionen von C-Bewegungen legen die Parameter „C coordinate modulus“ und „C coordinate modulo tolerance window“ im Fall von Modulo Positionierung die Umrechnung in die absolute Zielposition fest. Für Details siehe Modulo Positionierung.
Auch AdoptTrackOrientation ist eine C-Bewegung und wird entsprechend von „C coordinate modulus“ und „C coordinate modulo tolerance window“ beeinflust. Für Details siehe AdoptTrackOrientation.
Die Parameter „PartOID“, „Simulation Mode“ und „Initial Position“ sind alle versteckt und in einer eigenen Gruppierung „Simulation“.
Weitere Parameter sind die „Maximum Dynamic(s)“ und die „Default Dynamic(s)“. Außerdem gibt es noch „Monitoring“-Parameter, die eine Positionsüberwachung des realen Movers aktivieren bzw. parametrieren.
Die Parameter „Maximum dynamic path XY“ und „Default dynamic path XY“ gelten tangential zur Bewegungsrichtung des Movers, z.B. für den Befehlsmodus OnTrack tangential zum Track.
Die koordinatenbasierten Default- und Maximaldynamiken gelten jeweils für die entsprechenden Koordinatenbasierenden Bewegungsbefehle, siehe Beispiel „Planar-Mover anlegen und koordinatenbasiert verfahren (MoveX, MoveY)“ und Beispiel „Planar-Mover mit Hilfsachsen anlegen und verfahren“.
Zusätzlich gelten die Parameter „Maximum dynamic X“ und „Maximum dynamic Y“ für den Befehlsmodus OnTrack. Es hat hierbei nur der Beschleunigungsparameter A einen Effekt. Er wird verwendet, um die maximale radiale Beschleunigung in Kurven einzustellen, wenn die Option „AccelerationLimitedVelocity" im „DynamicsReductionMode" aktiviert ist und auf einem Track verfahren wird. Für Details siehe Limits und Optionen der Bewegungsbefehle.
Der Parameter „Timeout for state machine“ gibt an, wie lange der Mover maximal in Enabling, Disabling oder Resetting verweilt, siehe „Timeouts der Transitionszustände“ in Zustandsdiagramm Planar-Objekte.
Ab Version V3.4.45: Der Parameter „Gap 2D“ gibt den Minimalabstand an, den ein Mover zu anderen Objekten einhält, wenn er mit dynamischer 2D-Kollisionsvermeidung verfahren wird.
Die Parameter „Minimal/Maximal Position“, „Default/Maximal Dynamic(s)“, „C coordinate modulus, „C coordinate modulo tolerance window“ und alle „Monitoring“-Parameter (Positionsüberwachung/Timeout/Gap) können im Zustand Enabled des Movers geändert werden. Bisher war dies nur bei Disabled möglich.
Der versteckte Initialparameter „TraceLevel“ beeinflusst, wie viele Informationen protokolliert werden (siehe Protokollierung („Logging/Tracing“)).
Parameter (Online): Zeigt den Zustand des Movers während der Laufzeit des Objektes. Die aktuell vorgegebene Position („SetPos“) und reale Position („ActPos“) sowie Zustandsinformationen werden angezeigt.
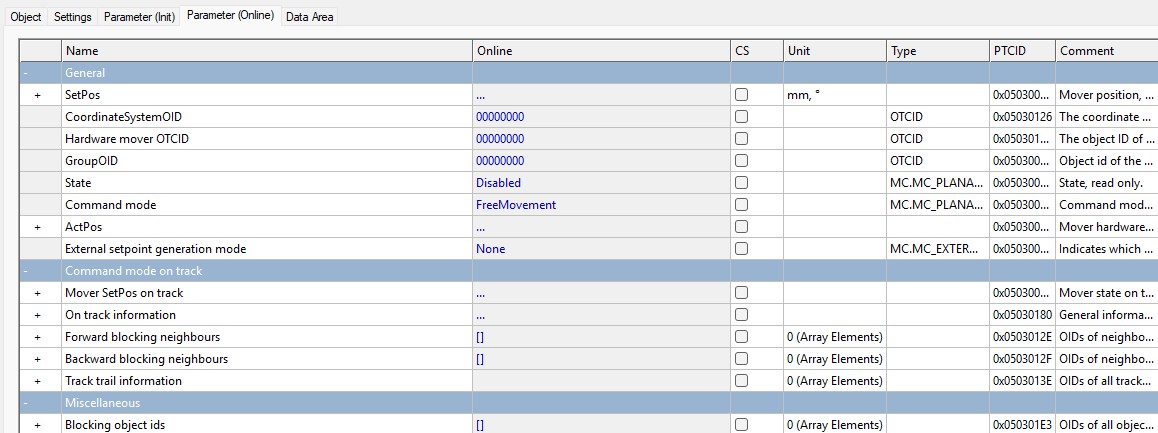
Der Parameter „External setpoint generation“ zeigt an, ob der Mover (absoluten oder relativen) externen Sollwerten des Nutzers folgt.
Der Parameter „CoordinateSystemOID“ gibt an, in welchem Koordinatensystem SetPos und ActPos angegeben sind, und in welchem Koordinatensystem sich der Mover befindet.
Ab Version V3.4.60: Die Parameter „On track information“, „Forward blocking neighbours“, „Backward blocking neighbours“ und „Track trail information“ geben spezifische Informationen zum aktuellen Zustand des Movers auf dem Track.
Ab Version V3.4.45: Der Parameter „Blocking object ids“ gibt 0-3 andere Planar-Objekte an, die diesen Mover in der dynamischen 2D-Kollisionsvermeidung blockieren. Die Blockierung kann in den drei Bewegungsrichtungen X, Y und C während des freien Verfahrens erfolgen.
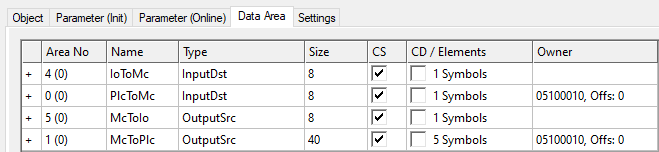
Data Area: Zeigt Speicherbereiche, über die der Mover mit anderen Objekten verknüpft ist und Informationen austauscht.
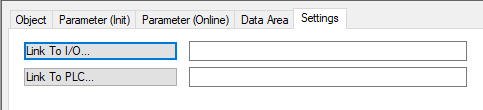
Settings: Hier kann der Anwender Verknüpfungen herstellen. Mit den beiden Buttons „Link To …“ kann der Planar-Mover mit den Movern in der PLC und im Xplanar-Treiber verknüpft werden.