Zustandsdiagramm
Das Zustandsdiagramm beschreibt den Zustand einer Coordinated-Motion-Gruppe. Die hier beschriebenen Zustände können mit Hilfe des Funktionsbausteins MC_GroupReadStatus aus der SPS ausgelesen werden.
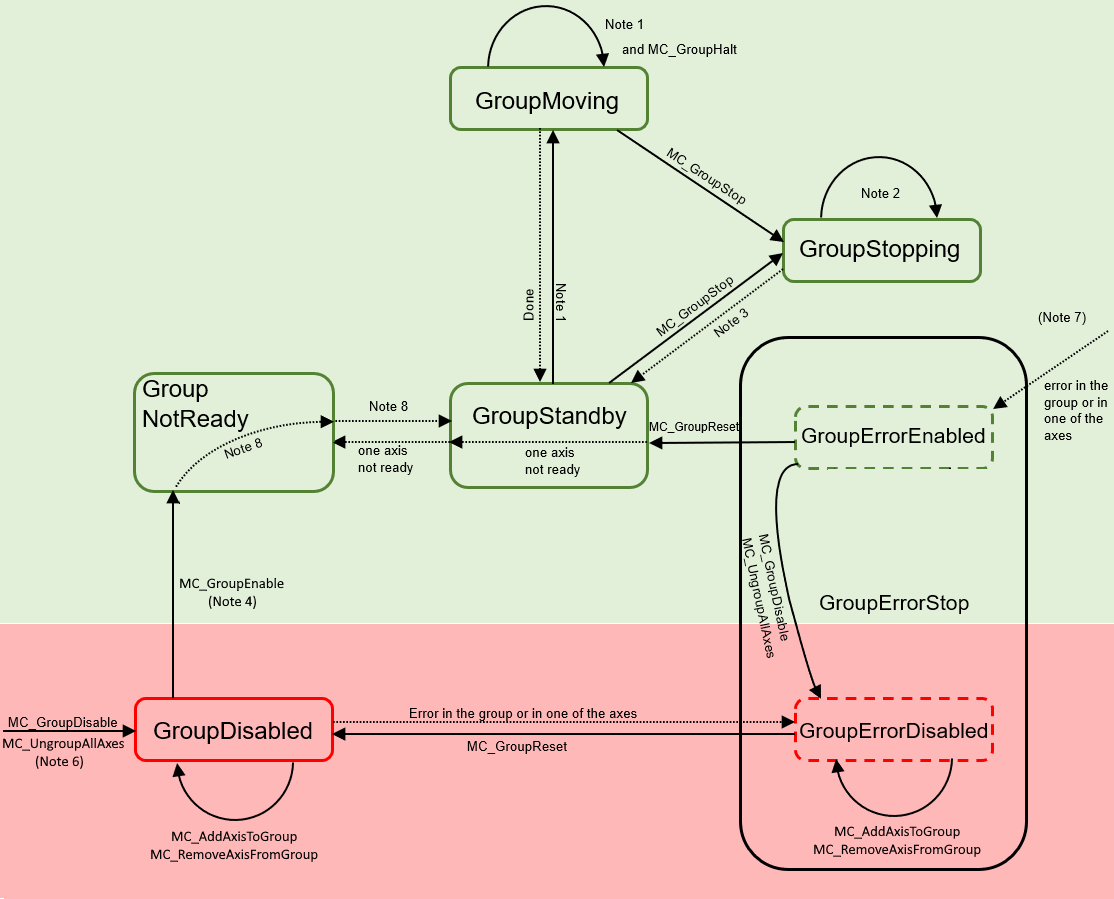

Hinweis | Beschreibung |
1 | Anwendbar für alle nichtadministrativen (Bewegungs-) Funktionsbausteine. |
2 | Im Zustand GroupStopping können zwar viele Funktionsbausteine aufgerufen werden, sie werden jedoch nicht ausgeführt. Ausnahmen sind MC_GroupDisable und MC_UngroupAllAxes, welche den Stopp abbrechen und den Übergang zum Zustand GroupDisabled erzeugen. |
3 | MC_GroupStop.DONE |
4 | Die Anzahl der Achsen in der Gruppe (hinzugefügt über MC_AddAxisToGroup) muss der Achsanzahl der Raumachskonvention plus dem Additional Axes Count entsprechen. |
5 | - |
6 | MC_GroupDisable kann in allen Zuständen aufgerufen werden und ändert den Zustand in GroupDisabled. Wenn MC_GroupDisable in einem Fehlerzustand aufgerufen wird, ändert sich der Zustand in GroupErrorDisabled. |
7 | Der Zustandswechsel zu GroupErrorEnabled erfolgt im Achs-/Gruppenfehlerfall aus jedem Zustand, in dem die Gruppe enabled ist. |
8 | Der Zustandswechsel erfolgt, wenn "bIsControlLoopClosed" für alle Achsen TRUE ist. "bPositiveDirection"/"bNegativeDirection" müssen nicht aktiviert sein. |
9 | - |
10 | MC_GroupReset hat keine Wirkung, wenn der Zustand ein anderer ist als GroupErrorStop. Um den Zustand GroupErrorStop zu verlassen, muss MC_GroupReset aufgerufen werden. |