Filterung der Istwerte der Förderachse
Das Synchronisieren und Nachführen des mitbewegten Werkstückkoordinatensystems PCS1 erfolgt anhand der Istwerte der Förderachse. Je nach Ausführung des linearen Förderers sind diese Istwerte mehr oder weniger stark verrauscht.
Dieses Rauschen wirkt sich aufgrund der Kopplung negativ auf den Konturfehler bei aktiver Synchronisation aus. Aus diesem Grund können die Istwerte mit einem Filter geglättet werden. Dazu stehen zwei verschiedene Filterkonfigurationen zur Verfügung, die je nach Betriebszustand des Förderers umgeschaltet werden können. Die Filterung reduziert auch die Gefahr von Dynamiküberschreitungen durch Geschwindigkeitssprünge im Messsignal.
Im Normalbetrieb mit konstanter Fördergeschwindigkeit wird die stark geglättete Fördergeschwindigkeit zur Synchronisation verwendet. Diese hat aufgrund der größeren Filterlänge, einzustellen mit P-AXIS-00623, eine größere zeitliche Verzögerung und ist weniger dynamisch. Mit diesem Filter ergeben sich im Normalbetrieb im gekoppelten System nur sehr geringe unerwünschte Anregungen in der Stellgröße durch Rauschen im Istpositionssignal der Förderachse.
Um den Konturfehler in dynamischen Phasen und insbesondere auch bei einem Bewegungsstopp zu minimieren, kann in der SPS über den Funktionsbaustein MCV_SetReducedFilter eine Umschaltung von der starken auf die schwache Filterung veranlasst werden. Diese schwache Filterung besteht aus einem Sinc (idealer Tiefpass)-Filter (P-AXIS-00625) und einem anschließenden Mittelwertfilter (P-AXIS-00624).
Beide Filter erzeugen durch die eingestellte Filterordnung eine größere oder kleinere Totzeit. Die schwache Filterung reagiert aufgrund der kleineren Filterbreite dynamischer und erzeugt auch eine kleinere Totzeit. Die gefilterte Geschwindigkeit wird zur Vorsteuerung der Totzeit verwendet.
Die einzelnen Filter können in den Achsparametern konfiguriert und im Betrieb der Förderachse die Filterparameter mit dem #MACHINE DATA-Befehl angepasst werden.
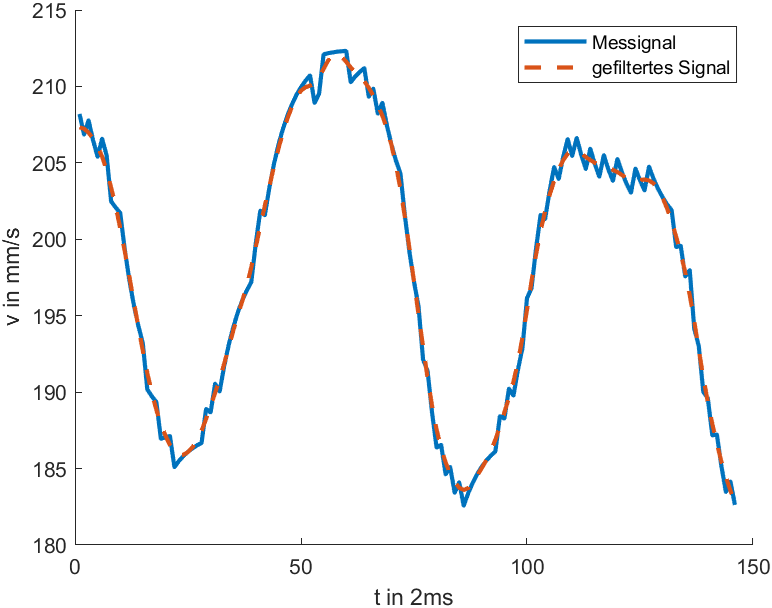
In dem folgenden Schaubilder ist ein Beispielsignalverlauf mit einem verrauschten Messsignal und dem gefilterten Signal mit einer Filterordnung von 10 (Parameter conv_sync.order_v_filter = 10).