2D-Kinematics Type 2 (P_2C2)
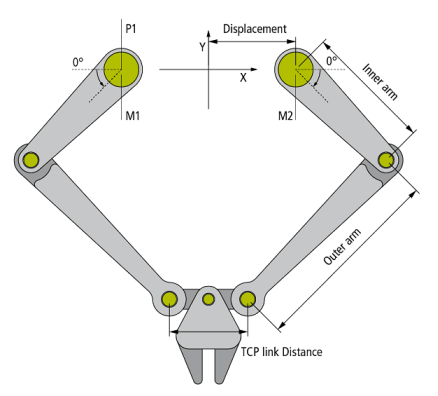
Die 2D-Kinematics Type 2 (P_2C2) ist, wie oben im Schema gezeigt, aufgebaut.
Alle Motorachsen sind in Grad skaliert und 0° ist, wie im Schema gezeigt, definiert, wobei der Pfeil die positive Richtung anzeigt.
Parameter für die Kinematik
Parameter | Beschreibung | Typ | Einheit |
|---|---|---|---|
Inner arm length | Länge von Drehpunkt zu Drehpunkt des inneren Arms |
| mm |
Outer arm length | Länge von Drehpunkt zu Drehpunkt des äußeren Arms |
| mm |
Displacement | Länge vom Mittelpunkt der Grundplatte bis zu den virtuellen Drehachsen des inneren Arms |
| mm |
TCP link distance | Distanz von Drehpunkt zu Drehpunkt des äußeren Arms |
| mm |
Parameter für das dynamische Modell
Parameter | Beschreibung | Typ | Einheit |
|---|---|---|---|
Inner arm mass | Gesamtmasse des inneren Arms |
| kg |
Inner arm moment of inertia | Trägheitsmoment des inneren Arms in Bezug zum Drehpunkt P1, der mit dem Motor verbunden ist. |
| kg mm^2 |
Outer arm mass | Masse des äußeren Arms - die Gelenkmasse kann optional als eigener Parameter beschrieben werden. |
| kg |
First link mass | Masse des Gelenks, das den inneren und äußeren Arm verbindet. Kann verwendet werden, wenn die Gelenkmasse nicht bereits in den äußeren und inneren Armen enthalten ist. |
| kg |
Second link mass | siehe First link mass |
| kg |
TCP mass | Masse des TCP, einschließlich Greiferplatte und Greifer - die Nutzlast wird normalerweise mit Hilfe eines getrennten Parameters beschrieben. |
| kg |
First drive torque OID | Objekt-ID des ersten Antriebsdrehmoments (siehe Antriebsdrehmoment (Drive Torque)) |
|
|
Second drive torque OID | Objekt-ID des zweiten Antriebsdrehmoments |
|
|
Allgemeine Parameter für die Kinematik
Allgemeine Parameter, die für jede Kinematik gelten, sind in den Abschnitten beschrieben:
Für alle Kinematiken mit Tool gilt zudem:
Voraussetzungen
Entwicklungsumgebung | Zielplattform | TwinCAT Funktion |
|---|---|---|
TwinCAT V3.1.4018.26 | PC or CX (x86 or x64) | TF5111 TwinCAT 3 Kinematic Transformation (Level 2) |