3D-Delta Y Type 4 (P_3C4)
Der 3D-Delta Y Type 4 (P_3C4) ist, wie oben im Schema gezeigt, aufgebaut.
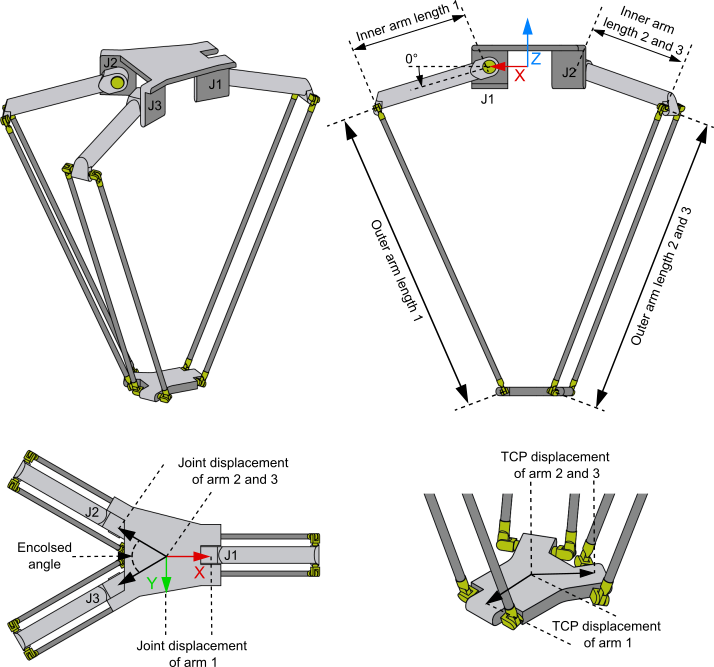
Alle drei Arme sind auf der gleichen Eben aufgehängt. Anders als beim 3D-Delta Type 1 (P_3C) kann der Winkel zwischen den Armen 2 und 3 vorgegeben werden.
Das Maschinenkoordinatensystem (MCS) befindet sich mittig zwischen den Armen auf Höhe der Motoren.
Alle Motorachsen sind in Grad skaliert und 0° ist, wie im Schema gezeigt, definiert, wobei der Pfeil die positive Drehrichtung anzeigt. Das gilt für alle drei Motoren.
Parameter für die Kinematik
Parameter | Beschreibung | Typ | Einheit |
|---|---|---|---|
Inner arm length 1 | Arm 1: Länge von Drehpunkt zu Drehpunkt des inneren Arms (direkt mit dem Motor verbunden) |
| mm |
Outer arm length 1 | Arm 1: Länge von Drehpunkt zu Drehpunkt des äußeren Arms |
| mm |
Joint displacement of arm 1 | Arm 1: Der Abstand vom MCS-Ursprung zur Motorachse |
| mm |
TCP displacement of arm 1 | Arm 1: Länge vom Mittelpunkt der Greiferplatte bis zu den virtuellen Drehachsen des äußeren Arms |
| mm |
Enclosed angle | Winkel zwischen den Armen 2 und 3 |
|
|
Inner arm length 2 and 3 | Arm 2, Arm 3: Länge von Drehpunkt zu Drehpunkt des inneren Arms (direkt mit dem Motor verbunden) |
| mm |
Outer arm length 2 and 3 | Arm 2, Arm 3: Länge von Drehpunkt zu Drehpunkt des äußeren Arms |
| mm |
Joint displacement of arm 2 and 3 | Arm 2, Arm 3: Der Abstand vom MCS-Ursprung zur Motorachse |
| mm |
TCP displacement of arm 2 and 3 | Arm 2, Arm 3: Länge vom Mittelpunkt der Greiferplatte bis zu den virtuellen Drehachsen des äußeren Arms |
| mm |
Allgemeine Parameter für die Kinematik
Allgemeine Parameter, die für jede Kinematik gelten, sind in den Abschnitten beschrieben:
Für alle Kinematiken mit Tool gilt zudem:
Voraussetzungen
Installationspaket | Zielplattform | TwinCAT Funktion |
|---|---|---|
TF5400 TwinCAT 3 Advanced Motion Pack V3.3.57 | PC or CX (x86 or x64) | TF5112 TwinCAT 3 Kinematic Transformation (Level 3) |