Homing
Als Homing bezeichnet man eine Initialisierungsfahrt einer Achse, bei der die korrekte Istposition anhand eines Referenzsignals ermittelt wird. Dies kann NC-geführt erfolgen, wie es hier beschrieben ist:
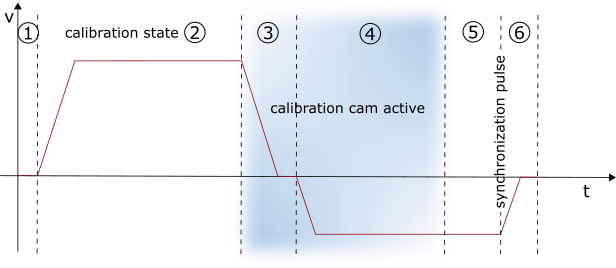
- Die Achse steht an einer zufälligen Position.
- Die Achse fährt in die parametrierte Richtung und sucht den Referenzschalter (Referenznocke/Eichnocke).
- Die Achse kehrt um, sobald die Referenznocke erkannt ist.
- Die Achse fährt von der Referenznocke herunter und erkennt die fallende Flanke der Nockensignals.
- Die Achse fährt weiter und sucht den Synchronimpuls (Latchsignal bzw. Nullimpuls des Gebers).
- Die Referenzposition wird gesetzt und die Achse stoppt. Die Stillstandsposition der Achse weicht ein wenig von der Referenzposition ab.
Alternativ gibt es noch das antriebsgeführte Homing, welches von einem geeigneten Antrieb ohne Einfluss der Steuerung selbstständig durchgeführt wird. Details hierzu entnehmen Sie bitte der Dokumentation des verwendeten Antriebssystems.
Invert Direction for Homing Sensor Search



Für die Standard-Homing-Sequenz kann die Richtung für die Suche der Eichnocke umgekehrt werden.
FALSE: Nocke wird in positiver Fahrtrichtung gesucht.TRUE: Nocke wird in negativer Fahrtrichtung gesucht.
Invert Direction for Sync Impuls Search

Für die Standard-Homing-Sequenz kann die Richtung für die Suche des Sync-Impulses umgekehrt werden.
FALSE: Synchronimpuls wird in positiver Fahrtrichtung gesucht.TRUE: Synchronimpuls wird in negativer Fahrtrichtung gesucht.
Home Position (Calibration Value)

Die Home Position ist der Positionswert, der der Achse zugewiesen wird, wenn der Synchronimpuls in der Referenzfahrt erscheint. Dies erfolgt während der Fahrt exakt mit dem Synchronimpuls. Da die Achse anschließend stoppt, weicht die Stillstandsposition von dem parametrierten Wert ab. Die Referenzierung ist dennoch exakt.
Reference Mode (Sync condition)

Der Parameter Reference Mode bietet die Möglichkeit, auszuwählen, welches Signal für die Sync-Impulssuche verwendet werden soll:
Default / Homing Sensor Only (PLC cam or digital input 1..8)- Die einfachste Art des Referenzierens einer Achse bei der ausschließlich das Nockensignal ausgewertet wird. Ein weiteres Synchronsignal wird nicht verwendet, daher sollte diese Einstellung nur gewählt werden, wenn die Achse keine umfangreicheren Optionen bietet.
Hardware Sync (Feedback reference pulse)- Einige Gebersysteme liefern zusätzlich zum Zählwert einen Synchronimpuls pro Umdrehung (Nullspur). Wenn die Auswertelogik des Gebers diesen Synchronimpuls erfasst, so wird die Genauigkeit der Referenzfahrt durch die Wahl dieses Modus erhöht. Die Genauigkeit ist vergleichbar mit Software-Sync. Um den Hardware-Sync Modus verwenden zu können, ist evtl. eine Parametrierung oder eine besondere Verkabelung des Antriebs oder Gebersystems notwendig.
Hardware Latch 1 (pos. edge), Hardware Latch 1 (neg. edge)- Beim Hardware-Latch wird zusätzlich zum Nockensignal auf ein externes Latch-Signal reagiert. Hierzu muss der Latch-Mechanismus im Antrieb konfiguriert werden und der Latch-Eingang verdrahtet werden.
Software Sync- Der Modus Software-Sync erhöht die Genauigkeit einer Referenzfahrt, indem er nach dem Erkennen des Referenznockensignals zusätzlich den Überlauf des Encoder-Zählwertes nach einer Geber- bzw. Motorumdrehung erkennt. Dieser Modus setzt einen teilabsoluten Geber (z. B. Resolver) voraus, da nur dann der Überlauf immer im selben Abstand zur Referenznocke erfolgt. Die Überlauferkennung wird durch den Parameter Reference Mask parametriert.
Application (PLC code)- Hierbei ist der gesamte Homing-Ablauf in der SPS zu programmieren:
Die NC setzt in diesem Fall das Bit 23 im Status „NcApplicationRequest“, welches von der SPS gepollt wird. Über MC_ReadApplicationRequest kann dann in der SPS ermittelt werden welches Anliegen die NC hat. Bisher wird nur 0 = NONE und 1 = HOMING unterstützt (siehe 0x33 unter "Index-Offset" Spezifikation für Achsparameter). Im Falle von Homing kann die SPS den Ablauf durch Verfahren der Achse selbst durchführen.
Homing Sensor Source

Default PLC Cam (MC_Home)- Standardmäßig kommt das Homing-Sensor Signal aus der SPS, mit dem Funktionsbaustein MC_Home mit dem Parameter bCalibrationCam, welcher automatisch mit dem PlcToNc.ControlWordD.7 verknüpft ist.
Digital Input [1-8]- Alternativ kann auch ein dem NC-Prozess verlinkter digitaler Eingang verwendet werden, dazu ist ein allgemeines Drive Status Byte mit 8 digitalen Eingängen im Prozessabbild definiert (Drive->Inputs->nState8), das als Signalquelle für den Homing-Sensor dienen kann. Ein zu verwendender digitaler Eingang muss also von Hand an die gewünschte Position in diesem Byte gemappt werden.