Quickstart
Nachfolgend wird im Quickstart gezeigt, wie Sie ein Simulink®-Modell in ein TwinCAT-Objekt umwandeln. Sollten Sie daran interessiert sein, wie ein solches erstelltes TwinCAT-Objekt im TwinCAT XAE eingebunden wird, siehe Erstellte TwinCAT-Objekte selbst ausprobieren.
Starten mit einem einfachen Simulink®-Modell
- Nutzen Sie gern die Möglichkeit, unsere eingebauten Samples für erste Schritte mit dem TwinCAT Target for Simulink® zu gehen. Im MATLAB® Command Window erhalten Sie eine Liste der verfügbaren Samples über:
TwinCAT.ModuleGenerator.Samples.List
- 1. Wählen Sie beispielsweise das Beispiel „Generate TwinCAT Classes From Simulink Models” aus und starten Sie das Beispiel über den Start-Link im Command Window.
TwinCAT.ModuleGenerator.Samples.Show('Generate TwinCAT Classes From Simulink Models') - Im Folgenden wird der Quickstart entlang dieses Samples ausgeführt.
- 2. Starten Sie zu Beginn, indem Sie den Button Open the model im Live Script anwählen.
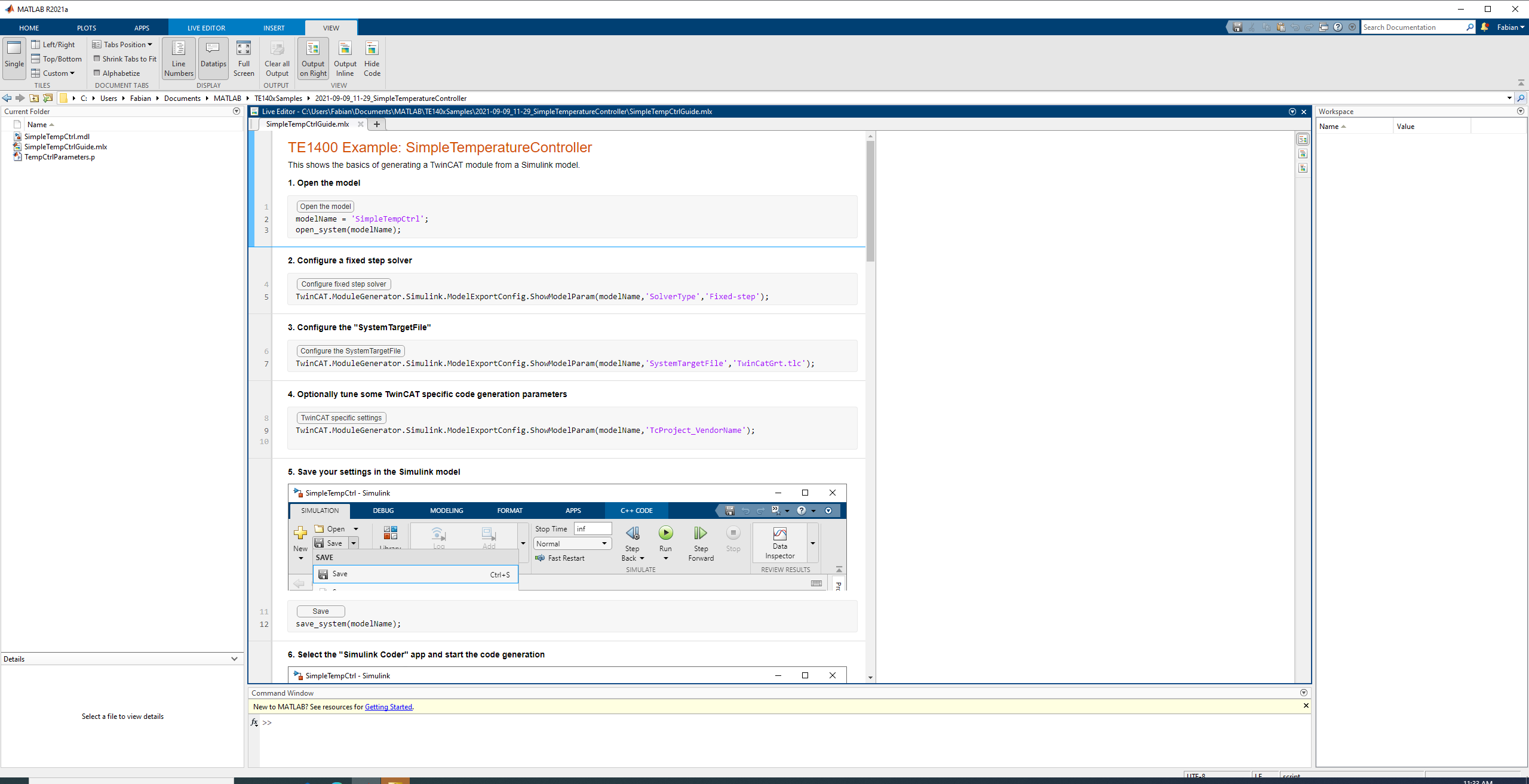
- Für die weiteren Konfigurationsschritte in Simulink® können Sie im Live Script einfach den jeweils nächsten Button betätigen.
 | Einsteigervideo Als Einstieg kann ebenso folgendes Video (nur auf Englisch verfügbar) genutzt werden: TwinCAT Target for Simulink® |
Die Konfigurationsschritte in Simulink®
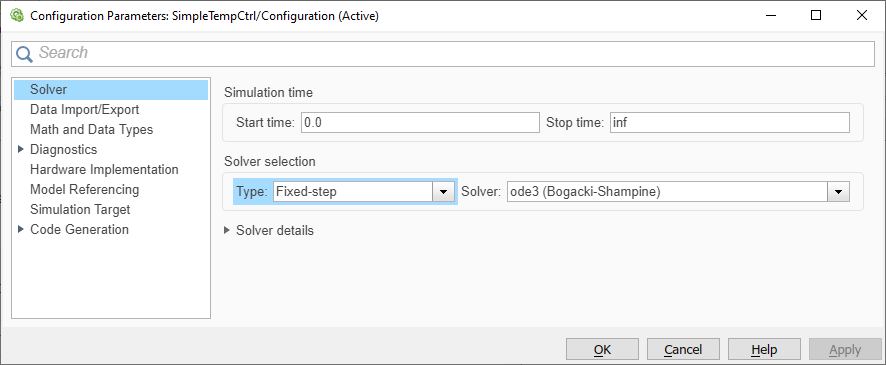
- 1. Wählen Sie einen Fixed-step solver aus. Gehen Sie dazu in die Configuration Parameters des Modells.
- 2. Wählen Sie das System Target file zu „TwinCatGrt.tlc“.
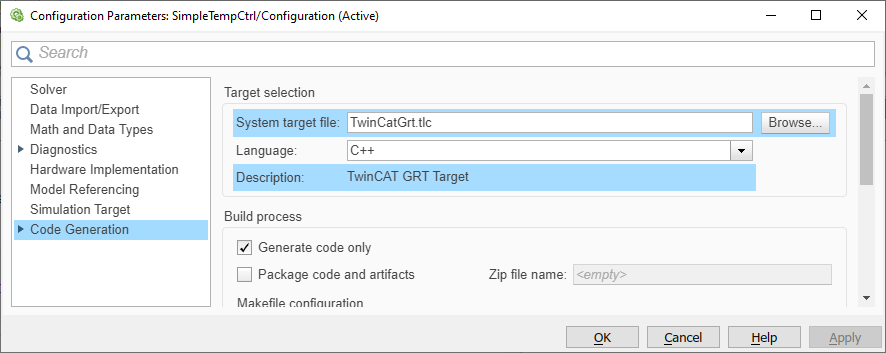
Optional: Stellen Sie unter Optimization den Parameter Default parameter behavior auf Tunable, damit Sie in TwinCAT weiterhin Modellparameter verändern können, siehe auch Parametrierung einer Modulinstanz.
- 3. Speichern Sie Ihre Änderungen im Simulink®-Modell.
- 4. Starten Sie die Code-Generierung über die Simulink® Coder™ App.


TcCOM in TwinCAT einfügen
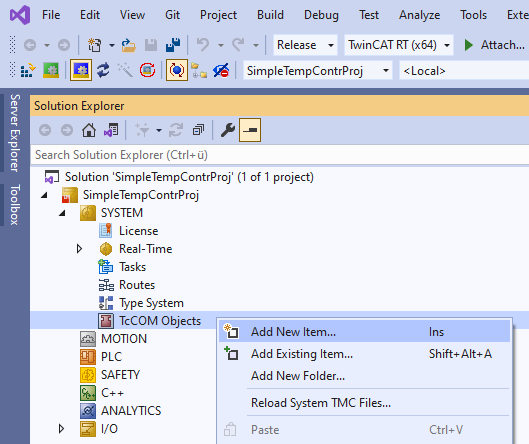
- 1. Öffnen Sie TwinCAT (TwinCAT XAE oder TwinCAT in einer Visual-Studio-Umgebung).
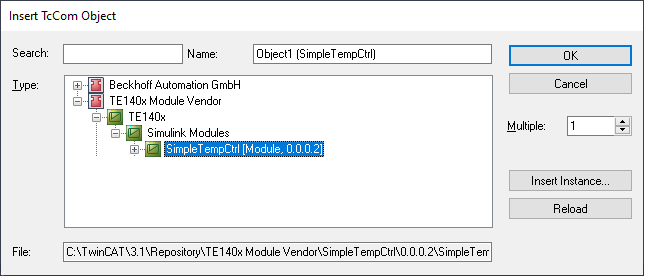
- 2. Instanziieren Sie ein neues TcCOM-Objekt.
- 3. Wählen Sie das gewünschte Objekt.
- 4. Erstellen Sie eine zyklische Task.
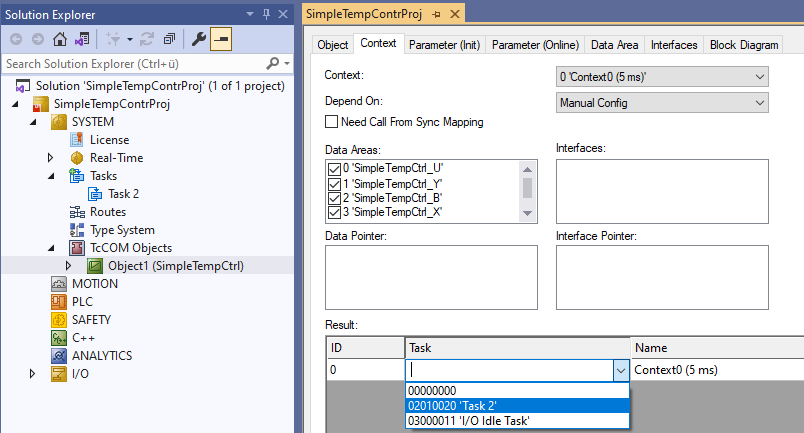
- 5. Weisen Sie die erstelle Task ihrer TcCOM-Instanz zu.
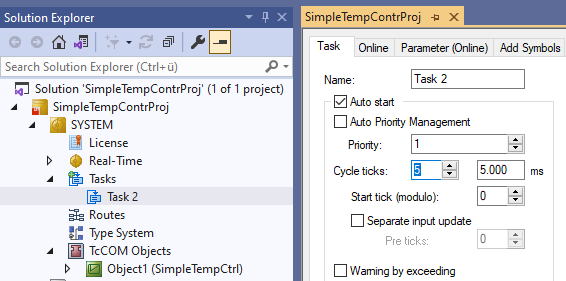
Beachten Sie, dass die Zykluszeit der Task und die SampleTime in Simulink® (hier 5 ms) passen.
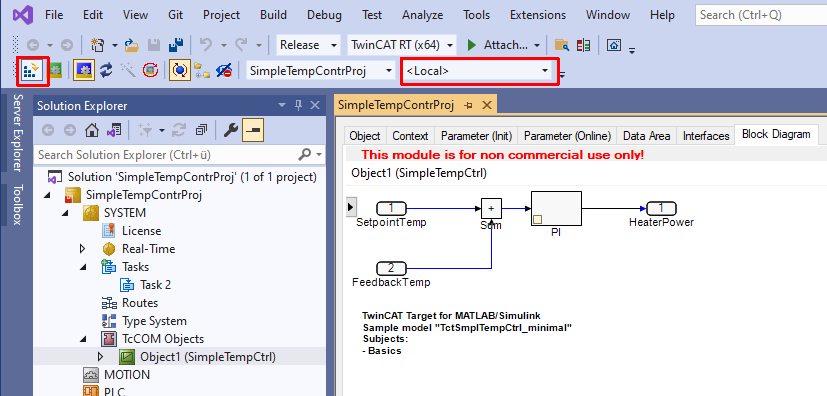
- 6. Aktivieren Sie die Konfiguration.
TcCOM-Instanz konfigurieren und verknüpfen
Der Datenaustausch der TcCOM-Instanz erfolgt über Mappings des Prozessabbilds. Simulink®-Inputs und Simulink®-Outputs werden automatisch als Inputs bzw. Outputs im Prozessabbild abgebildet und können mit I/O oder anderen Objekten verknüpft werden.
Im Bereich Parameter (Init) der TcCOM-Instanz können Sie die Instanz optional anders konfigurieren als bei der Erstellung aus Simulink® angegeben.

Beispielsweise können Sie hier den Parameter Kp auf „52“ setzen. Das TcCOM-Modul würde dann diesen Wert als Startup-Wert für diese Instanz nutzen.
Einfügen als SPS-Funktionsbaustein
Die im Folgenden genutzte SPS-Bibliothek ist nur dann vorhanden, wenn folgende Parameter in Simulink® gesetzt sind:
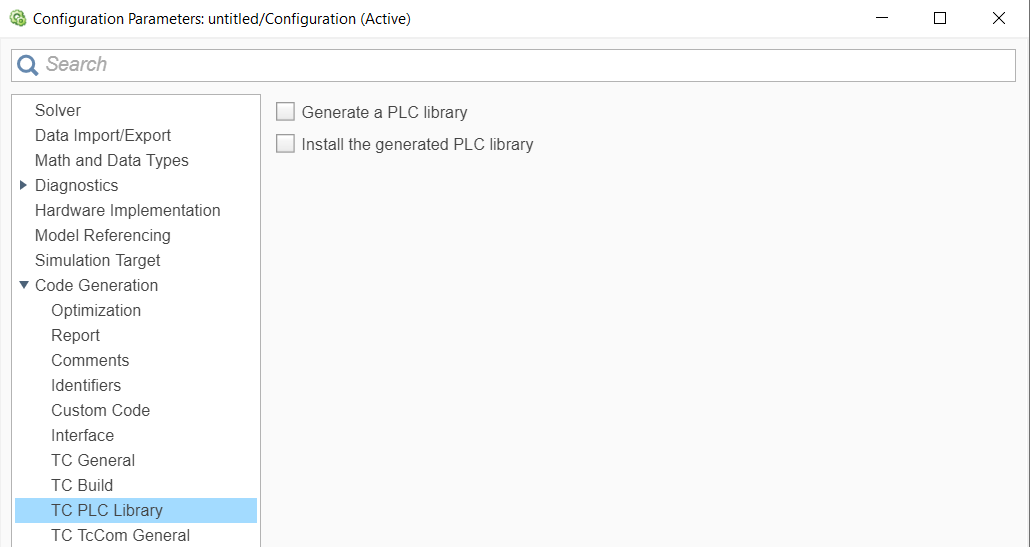
Sollten diese Optionen nicht gesetzt worden sein, kann dies nachträglich ohne Einsatz von Simulink® und dem TwinCAT Target for Simulink® erfolgen, siehe dazu SPS-Bibliothek erzeugen und installieren.
Kurzübersicht Handlungsschritte SPS-Bibliothek/Funktionsbaustein
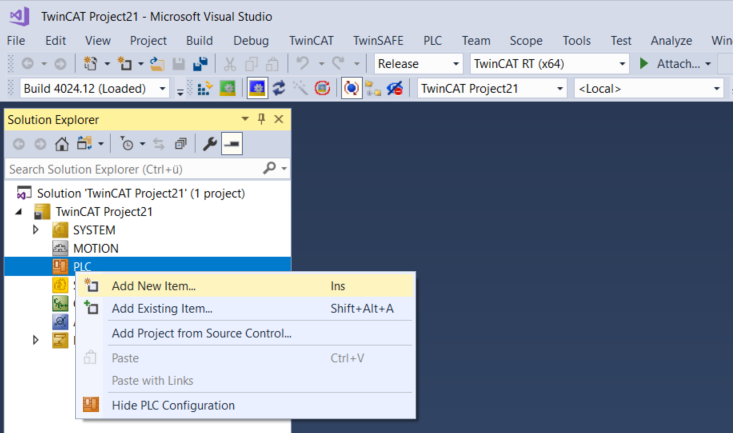
- SPS in TwinCAT erstellen:
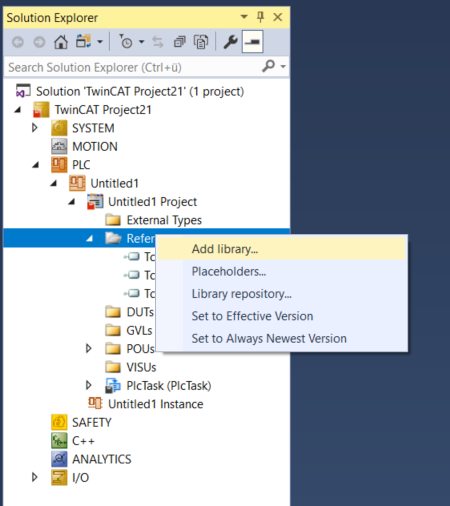
- SPS Bibliothek hinzufügen:
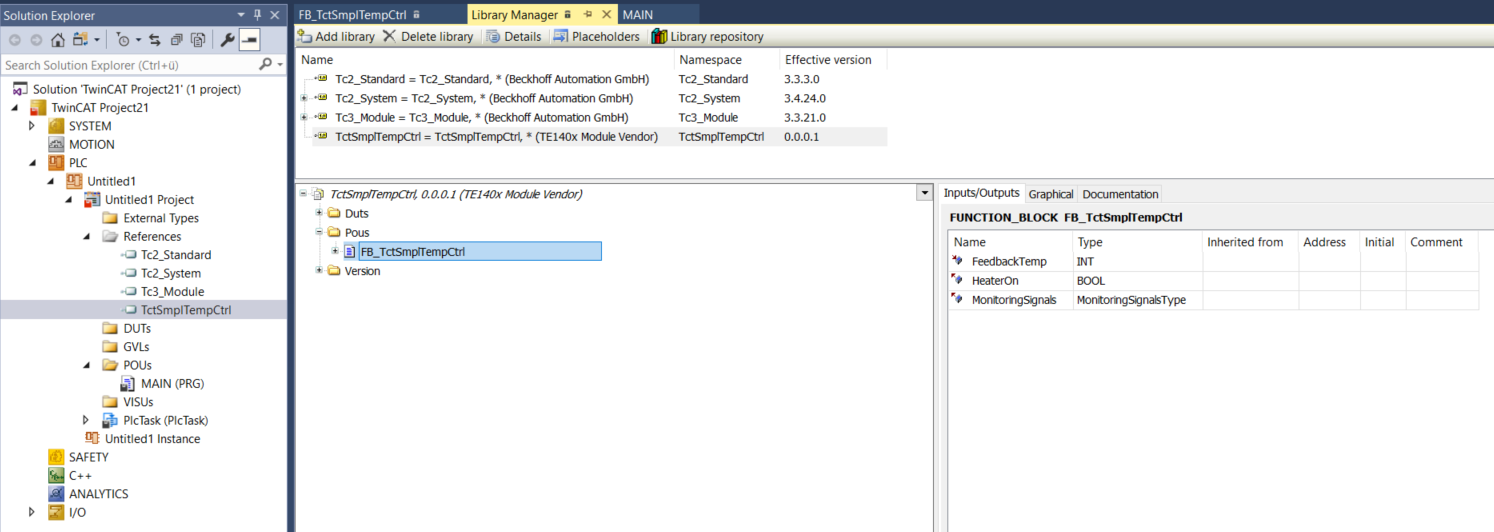
- SPS Bibliothek selektieren und Inhalt betrachten:
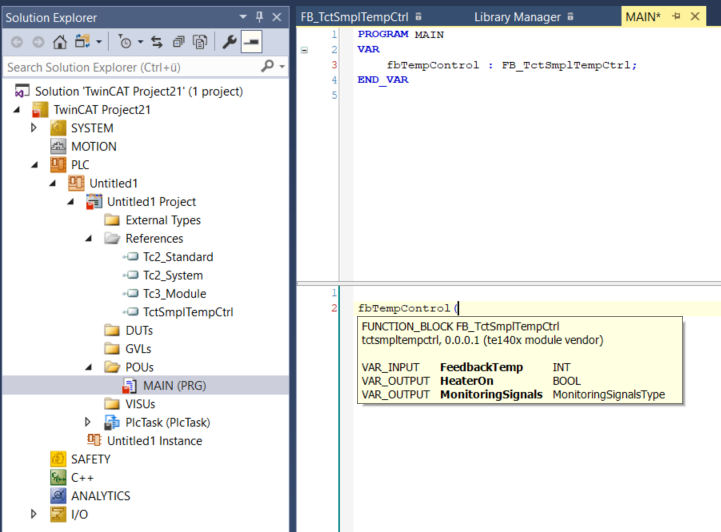
- Funktionsbaustein aus der Bibliothek in der SPS verwenden:
| Aufruf eines TcCOM-Objekts auch aus der SPS möglich Zusätzlich zu der hier beschriebenen Variante können Sie eine Instanz eines TcCOM auch aus der SPS heraus aufrufen, siehe Anwenden des TcCOM-Wrapper-FB. |
| Weiterführendes Beispiel Nach erfolgreichem Bearbeiten des Einsteiger-Beispiels, empfehlen wir folgendes Beispiel zur Vertiefung der Kenntnisse: |