FB_BA_PIDCtrl
Der Funktionsbaustein FB_BA_PIDCtrl ist ein Universal-PID-Regler.
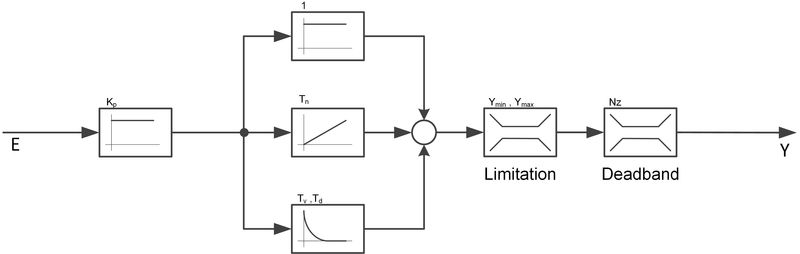
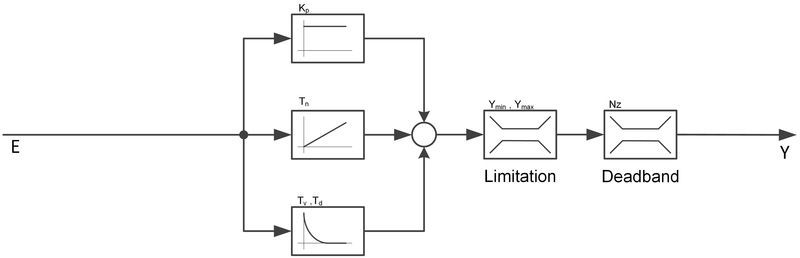
Der Regler ist intern in zwei aufeinander folgende Teile gegliedert:
- der Regler selbst, wie in den unten aufgeführten Wirkungsplänen als P-, I- und D-Anteil dargestellt mit einer Ausgangsbegrenzung (Limitation).
- einem Totbandglied (neutrale Zone), welches die Ausgangsänderungen des Reglers mit einer Hysterese beaufschlagt.
Betriebsmodus "P-Anteil vorgelagert":
(eOperationMode = E_BA_PIDMode.eP1ID)
Betriebsmodus "Parallelstruktur":
(eOperationMode = E_BA_PIDMode.ePID )
Wirksinn
Mit bActn = FALSE wird der Wirksinn des Reglers so umgekehrt, dass eine Regelabweichung kleiner als 0 eine Stellgrößenänderung ins Positive bewirkt. Dies wird dadurch erreicht, dass die Regelabweichung negativ berechnet wird:
bActn | fE (Regelabweichung) | Wirksinn |
|---|---|---|
TRUE | fX-fW (Istwert-Sollwert) | direkt (Kühlen) |
FALSE | fW-fX (Sollwert-Istwert) | indirekt (Heizen) |
Passiv-Verhalten (bEn = FALSE)
Die Ausgänge werden wie folgt gesetzt:
fY | 0.0 |
fE | aktuelle Regelabweichung, siehe Wirksinn. |
Die internen Werte für den P-, I-, und D-Anteil werden auf 0 gesetzt, ebenso die Werte für den I- und D-Anteil vom vorhergehenden Zyklus. Damit wird die Stellgröße bei einem Neustart im ersten Zyklus ohne Vergangenheitswerte berechnet.
Aktiv-Verhalten (bEn = TRUE)
Im ersten Zyklus werden I- und D-Anteil wie bereits erwähnt ohne Vergangenheitswerte berechnet und frei von alten Werten aufgestartet.
Anti-Reset-Windup
Ist der I-Anteil aktiv, so sorgt der Regler dafür, dass dieser festgehalten wird, sollte der Regler Ausgang rY über die Grenzen fYMin oder fYMax hinausgehen wollen. Innerhalb des Reglers wird in jedem Zyklus eine Vorberechnung des Regler Ausgangs gemacht.
Anti-Reset-Windup an Min Grenze
Ist die Vorberechnung kleiner als die untere Ausgangsgrenze fYMin, so wird der I-Anteil daran gehindert weiter zu fallen und auf den Wert des letzten PLC-Zyklus begrenzt. Ein Ansteigen des I-Anteils bleibt jedoch möglich.
Anti-Reset-Windup an Max Grenze
Ist die Vorberechnung hingegen größer als die obere Grenze fYMax, so wird der I-Anteil daran gehindert weiter zu steigen und ebenfalls auf den Wert des letzten PLC-Zyklus begrenzt. In diesem Fall bleibt ein Abfallen des I-Anteiles weiter möglich.
Synchronisationen
Es gibt verschiedene Fälle in denen Regler Ausgang nicht nur begrenzt, sondern durch Manipulation des I-Anteils (wenn nicht aktiv, dann des D-Anteils bzw. des P-Anteils) auf einen neuen Wert synchronisiert werden muss. Diese Fälle sind wegen der möglichen Gleichzeitigkeit priorisiert:
Prio | Beschreibung | Bedingungen | Bemerkungen |
|---|---|---|---|
1 | Synchronisation über bSync/fSync | Regler freigegeben – bEn = TRUE | Ein positives Signal an bSync setzt den I-Anteil so, dass die Stellgröße den Wert fSync annimmt. Diese Methode kann, wenn bEn und bSync gleichzeitig gesetzt werden, zum Setzen eines Initialwertes genutzt werden, von dem aus die Regelung startet. Ist der I-Anteil nicht aktiv, so wird der D-Anteil entsprechend gesetzt. Zu beachten ist, dass intern nur die steigende Flanke von bSync ausgewertet wird, da es sich um eine Setz-Aktion handelt. Für ein erneutes Synchronisieren, etwa auf einen Übergabewert, muss am Eingang bSync ein erneutes TRUE-Signal angelegt werden. |
2 | Bereichssynchronisation fYMin | Regler freigegeben – bEn = TRUE fYMin <> fYMin_1 (letzterZyklus) fY_Test < fYMin | Hat sich die untere Bereichsgrenze geändert und die vorberechnete Regler Ausgabe ist nun kleiner als fYMin so wird auf fYMin synchronisiert. |
3 | Bereichssynchronisation fYMax | Regler freigegeben – bEn = TRUE fYMax <> fYMax_1 (letzterZyklus) fY_Test > fYMax | hat sich die obere Bereichsgrenze geändert und die vorberechnete Regler Ausgabe ist nun größer als fYMax, so wird auf fYMax synchronisiert |
4 | Synchronisation bei Wirksinnumkehr | Regler freigegeben – bEn = TRUE eActn <> eActn_1 (letzter Zyklus) | Es wird so synchronisiert, dass der Ausgang den Wert VOR der Umkehr innehat: |
5 | Anti-Reset-Windup | Regler freigegeben – bEn = TRUE | siehe Anti-Reset-Windup |
Neutrale Zone
Ein Wert von fNeutralZone > 0.0 gibt die Funktion der neutralen Zone (Deadband) frei. Ein Wert gleich Null deaktiviert das Totbandglied und die Werte am Eingang werden direkt durchgereicht.
Ist beim aktiven Regler die Änderung am Eingang des Gliedes in einem SPS-Zyklus im Vergleich zum vorhergehenden SPS-Zyklus kleiner als fNeutralZone / 2, so wird der Ausgang auf dem Wert des vorhergehenden Zyklus gehalten, bis die Änderung größer oder gleich fNeutralZone / 2 ist.
Durch diese Funktion sollen unnötig viele Stellimpulse vermieden werden.
Syntax
VAR_INPUT
bEn : BOOL;
fW : REAL;
fX : REAL;
eActn : E_BA_Action := E_BA_Action.eReverse;
fYMax : REAL := 100;
fYMin : REAL := 0;
bSync : BOOL;
fSync : REAL;
END_VAR
VAR_INPUT CONSTANT PERSISTENT
nCycleCall : UDINT := 5;
eOperationMode : E_BA_PIDMode := E_BA_PIDMode.eP1ID;
fProportionalConstant : REAL;
tIntegralTime : TIME;
tDerivativeTime : TIME;
tDampingTime : TIME;
fNeutralZone : REAL := 0.0;
END_VAR
VAR_OUTPUT
fY : REAL;
fE : REAL;
END_VAR Eingänge
Eingänge
Name | Typ | Beschreibung |
|---|---|---|
bEn | BOOL | Freigabe des Reglers. |
fW | REAL | Sollwert der Regelstrecke. |
fX | REAL | Istwert der Regelstrecke. |
eActn | Wirksinn des Reglers. | |
fYMax | REAL | Obere Ausgangsbegrenzung des Reglers [%]. |
fYMin | REAL | Untere Ausgangsbegrenzung des Reglers [%]. |
bSync | BOOL | Synchronisiert den Regler auf den Wert von fSync. |
fSync | REAL | Synchronisationswert. Der Wert fSync wird intern begrenzt auf Werte von fYMin bis fYMax. |
Eingänge CONSTANT PERSISTENT
Name | Typ | Beschreibung |
|---|---|---|
nCycleCall | UDINT | Aufrufzyklus des Bausteines als Vielfaches der Zykluszeit. Intern begrenzt auf einen Minimalwert von 1. |
eOperationMode | Wirkungsweise des Reglers: PID-Modus oder P-ID-Modus | |
fProportionalConstant | REAL | Reglerverstärkung. Wirkt nur auf den P-Anteil. Intern begrenzt auf einen Minimalwert von 0. |
TIntegralTime | TIME | Nachstellzeit des I-Anteiles [ms]. Ein Nullwert an diesem Parameter schaltet den I-Anteil ab. |
tDerivativeTime | TIME | Vorhaltezeit des D-Anteiles [ms]. Ein Nullwert an diesem Parameter schaltet den D-Anteil ab. |
tDampingTime | TIME | Dämpfungszeit des D-Anteiles [ms]. |
fNeutralZone | REAL | Totband |
 Ausgänge
Ausgänge
Name | Typ | Beschreibung |
|---|---|---|
fY | REAL | Stellgröße. Bereich durch fYMin und fYMax eingeschränkt. |
fE | REAL | Regelabweichung (Die Berechnung ist abhängig vom Wirksinn). |
Voraussetzungen
Entwicklungsumgebung | Erforderliche SPS-Bibliothek |
|---|---|
TwinCAT3.1 4024.35 | Tc3_BA2_Common ab V2.1.20.0 |