Karteireiter "DXD"
Karteireiter "DXD"
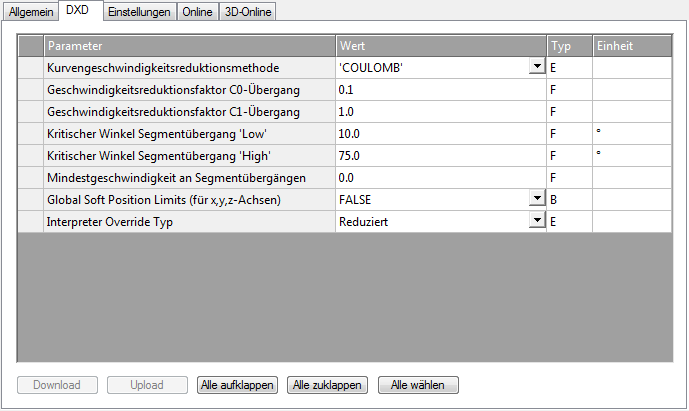
Auf der Eigenschaftsseite 'DXD' werden die NCI-Gruppenparameter beschrieben.
Kurvengeschwindigkeitsreduktionsmethode
Die Kurvengeschwindigkeitsreduktionsmethode wirkt ausschließlich für C0-Übergänge (vergl. Klassifikation der Segmentübergänge)
Defines der Kurvengeschwindigkeitsreduktionsmethoden
0 Coulomb
1 Cosinus
2 VeloJump
3 DeviationAngle (not yet released)
Methode | Beschreibung |
|---|---|
Coulomb | Die Coulomb-Reduktionsmethode ist ein dynamisches Verfahren in Analogie zur Coulombstreuung. |
Cosinus | Die Cosinus-Reduktionsmethode ist ein rein geometrisches Verfahren.
Reduktionsschema:
Will man (bis auf φ = 0) vollständig reduzieren, dann muss man C0 = 0.0, φlow=0 und φhigh sehr klein aber ungleich 0 setzen (z.B. 1.0E-10) |
VeloJump | Hierbei handelt es sich um ein geometrisches Verfahren zur Bestimmung der Segmentübergangsgeschwindigkeit bei einem C0-Übergang. Bei diesem Verfahren wird die Bahngeschwindigkeit ggf. so reduziert, dass der auftretende Geschwindigkeitssprung nicht grösser wird, als max. erlaubt. Dieser berechnet sich nach der Formel: VeloJump-Faktor * Zykluszeit * min(Beschleunigung; Verzögerung) Weitere Information |
Geschwindigkeitsreduktionsfaktor C0-Übergang
Reduktionsfaktor für C0-Übergänge. Die Wirkungsweise ist von der Reduktionsmethode abhängig.
C0 ∈ [0.0, 1]
Geschwindigkeitsreduktionsfaktor C1-Übergang
Zuerst wirdV_link gleich dem Minimum der beiden Segmentsollgeschwindigkeiten gesetzt: V_link = min(V_in,V_out). In Abhängigkeit von den Geometrietypen G_in und G_out auf den zu verbindenden Segmenten und den Ebenenanwahlen auf G_in und G_out wird der geometrisch induzierte absolute Beschleunigungssprung AccJump im Segentübergang unter der Geschwindigkeit V_link berechnet. Ist dieser größer als C1 mal der für die Geometrien und Ebenen zulässigen Bahn-Beschleunigung /(absolute)Verzögerung AccPathReduced, dann wird die Geschwindigkeit V_link so reduziert, dass der sich ergebende Beschleunigungssprung gleich AccPathReduced ist. Ist dieser Wert kleiner als V_min, dann hat V_min Priorität.
Reduktionsfaktor für C1-Übergänge: C1 ≥ 0.0
Kritischer Winkel Segementübergang 'Low'
Paramter für φlow. Beschreibung zur Wirkungsweise vergl. Kurvengeschwindigkeitsreduktionsmethode
Kritischer Winkel Segementübergang 'High'
Paramter für φhigh. Beschreibung zur Wirkungsweise vergl. Kurvengeschwindigkeitsreduktionsmethode
Mindestgeschwindigkeit an Segmentübergängen
Jede NCI-Gruppe hat eine Mindestbahngeschwindigkeit V_min≥ 0.0 die niemals unterschritten werden sollte. Vom Benutzer vorgegebene Ausnahmen sind: programmierter Halt am Segmentübergang, Bahnende und Overrideanforderungen die unter die Mindestgeschwindigkeit führen. Systembedingte Ausnahme ist eine Bewegungsumkehr. Bei der Reduktionsmethode DEVIATIONANGLE gilt für den Ablenkungswinkel φ ≥ φ_h, dann wird die Mindestgeschwindigkeit nicht beachtet. V_min muss kleiner als die Bahnsollgeschwindigkeit (F-Wort) jedes Segments sein.
Die Mindestgeschwindigkeit kann jederzeit im NC-Programm auf einen neuen Wert V_min≥ 0.0 in Einheiten mm/sec gesetzt werden.
Global Soft Position Limits (für x,y,z-Achsen)
Parameter zum Einschalten der Software-Endlagen der Bahn
Beschreibung im Anhang unter Parametrierung.
Interpreter Override Typ
Parameter zur Auswahl des Overridetyps der Bahn (Beschreibung siehe Bahnoverride (Interpreter-Overridetypen)).