Unterstützte Transformationen
Übersicht
|
Transformationstyp |
Schema |
Erforderliches Level und Version |
|---|---|---|
|
|
Level 1 Version 2.11.0 Build 3 | |
|
|
Level 2 Version 2.11.0 Build 3 | |
|
|
Level 2 Version 2.11.0 Build 3 | |
|
|
Level 2 Version 2.11 Build 6 | |
|
|
Level 2 Version 2.11 Build 6 | |
|
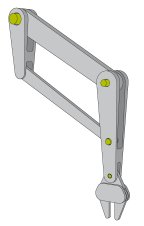
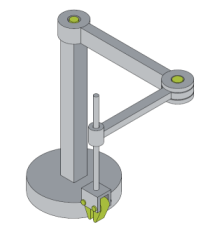
2D-Kinematik Typ 6 (P XX) |
|
Level 2 |
|
|
Level 3 Version 2.11.0 Build 3 | |
|
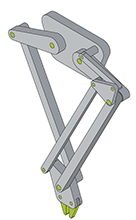
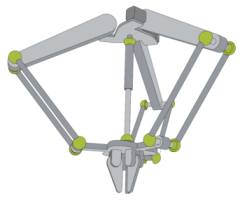
Delta Typ 2 |
|
Level 3 |
|
|
Level 3 | |
|
|
Level 4 |

Zusätzliche Objekte
|
Objekttyp |
Beschreibung |
Erforderliches Level und Version |
|---|---|---|
|
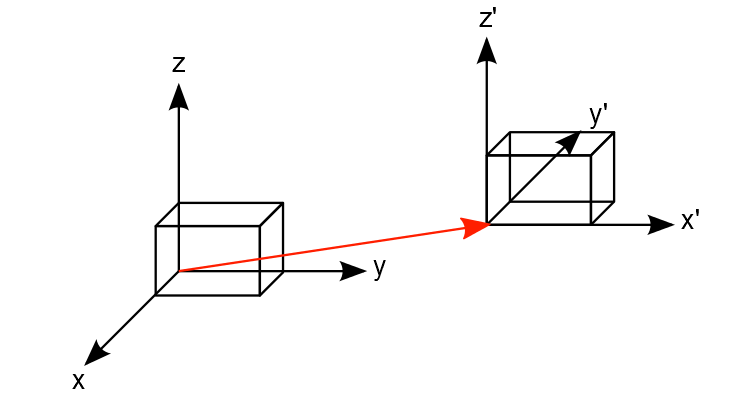
Beschreibt ein benutzerdefiniertes Koordinatensystem. |
Level 1 | |
|
Beschreibt ein Werkzeug auf Höhe des Kinematikflansches. |
Level 1 | |
|
Beschreibt ein am Kinematikflansch befestigtes 1D-Werkzeug, das die Möglichkeit bietet, den TCP in Richtung des Werkzeugs zu bewegen. |
Level 1 | |
|
Stellt die Trägheit und die Effizienz des Motors und des Getriebes dar, um das dynamische Modell genauer berechnen zu können. |
Level 1 |