Statische Transformation
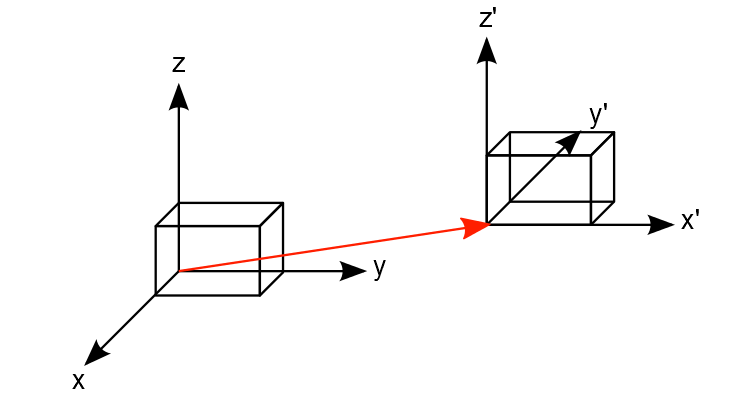
Die statische Transformation unterstützt eine Translation und eine Rotation. Durch Verwendung dieser Transformation besteht die Möglichkeit, ein Benutzerkoordinatensystem (UCS, „User Coordinate System“) zu definieren. Dieses Modul kümmert sich um die Transformation vom UCS zum Maschinenkoordinatensystem (MCS).
Die Parametrierung wird vom MCS zum UCS (Vorwärtstransformation) durchgeführt.
Zuerst muss die Translation beschrieben und anschließend die Rotation berechnet werden. Deswegen wird die in DIN 9300 beschriebene Roll-Nick-Gier-Regel verwendet. Die Berechnungssequenz für die Vorwärtstransformation ist Z, Y', X''.
|
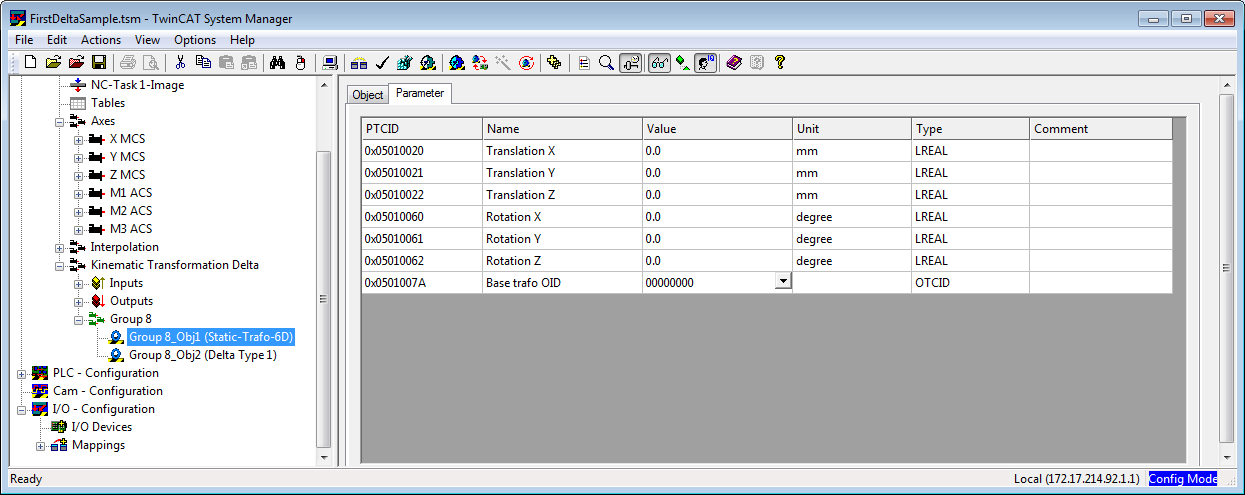
Parameter |
Beschreibung |
Einheit |
|---|---|---|
|
Translation X |
Verschiebung in der X-Richtung vom MCS zum benutzerdefinierten Koordinatensystem. |
mm |
|
Translation Y |
Verschiebung in der Y-Richtung vom MCS zum benutzerdefinierten Koordinatensystem. |
mm |
|
Translation Z |
Verschiebung in der Z-Richtung vom MCS zum benutzerdefinierten Koordinatensystem. |
mm |
|
Rotation X |
Rechtsdrehung um die X''-Achse in Grad |
Grad |
|
Rotation Y |
Rechtsdrehung um die Y'-Achse in Grad |
Grad |
|
Rotation Z |
Rechtsdrehung um die Z-Achse in Grad |
Grad |
|
Base Trafo OID |
Im Falle einer kaskadierten statischen Transformation wird die Objekt-ID der Basistransformation an dieser Stelle parametriert. |
|