SCARA
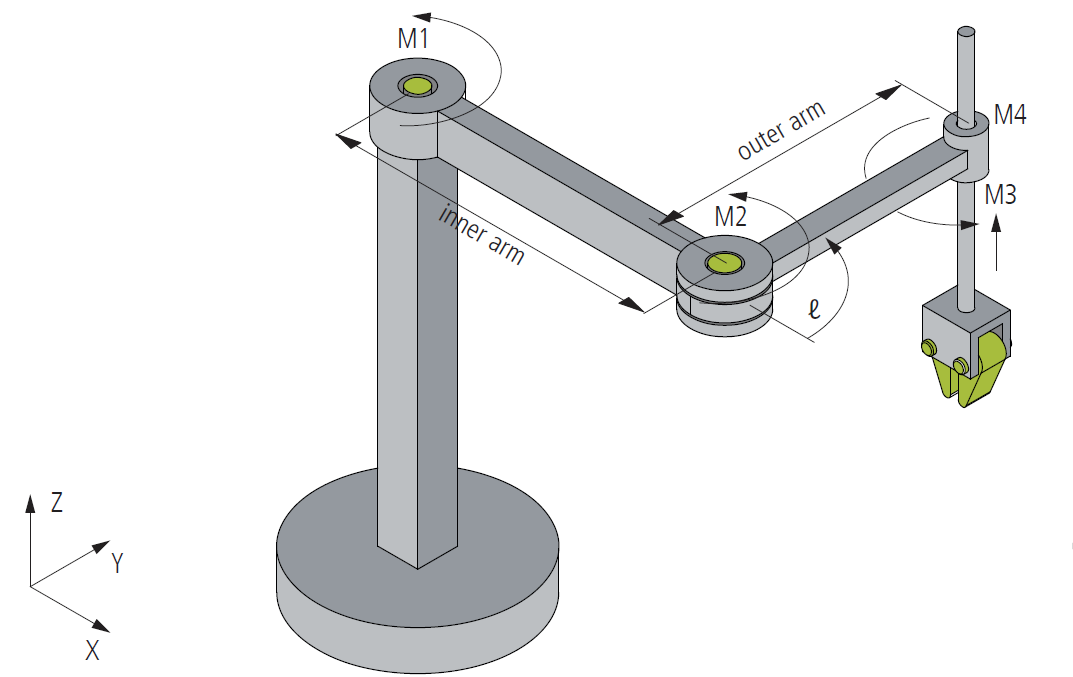
Die SCARA-Kinematik („Selective Compliance Assembly Robot Arm“) ist wie im Schema oben aufgebaut.
Die Motorachsen 1, 2 und 4 sind in Grad skaliert, wobei die positive Drehrichtung in Pfeilrichtung ist. Die dritte Motorachse ist in mm skaliert.
Der Nullpunkt des MCS befindet sich im ersten Gelenk (M1). Die X-Achse wird vom SCARA Arm bestimmt, wenn alle Drehmotorachsen bei 0° stehen.
Parameter für die Kinematik
|
Parameter |
Beschreibung |
Einheit |
|---|---|---|
|
Inner arm length |
Länge von Drehpunkt zu Drehpunkt des inneren Arms. Dies ist der Arm auf der Nullpunktseite. |
mm |
|
Outer arm length |
Länge von Drehpunkt zu Drehpunkt des äußeren Arms. Dies ist der Arm auf der TCP-Seite. |
mm |
|
Tool offset |
Objekt-ID eines am Kinematikflansch befestigten Werkzeugs. |
|
|
MCS2WCS OID |
Objekt-ID einer statischen Transformation, die die Position des MCS im Basiskoordinatensystem (normalerweise das Werkstückkoordinatensystem, WCS) definiert. |
|
Erforderliches Produkt-Level:
Level 3