Produktbeschreibung
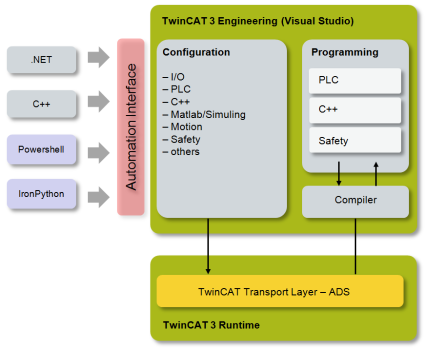
Mit dem TwinCAT Automation Interface können TwinCAT XAE Konfigurationen per Programmier-/Skriptcodes automatisch erzeugt und bearbeitet werden. Die Automatisierung einer TwinCAT-Konfiguration steht dank sogenannter Automation Interfaces zur Verfügung, auf die über alle COM-fähigen Programmiersprachen (z.B. C++ oder .NET) und auch über dynamische Scriptsprachen wie Windows PowerShell, IronPython oder sogar das (veraltete) VBscript zugegriffen werden kann. Diese Automation Interfaces sind an das Visual Studio-Automatisierungsmodell gebunden, einem mit TwinCAT3-Funktionen erweiterten Visual Studio.
Das TwinCAT-Automation Interface ermöglicht einen effizienten Entwicklungsprozess, indem den Kunden die Möglichkeit geboten wird, die Konfiguration einer umfassenden TwinCAT-Lösung zu automatisieren.
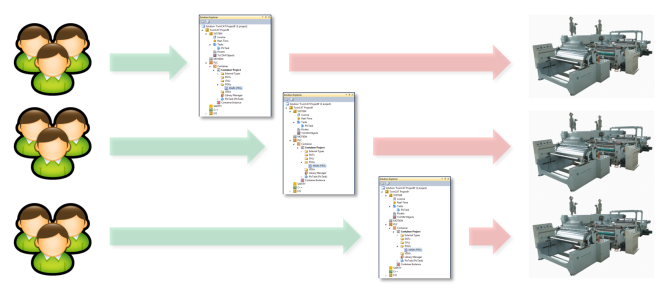
Bisher, im traditionellen Engineering-Gedanken, musste eine Maschinenkonfiguration manuell an jedes neue Projekt angepasst oder sogar ganz neu erstellt werden, was nicht bloß einen riesigen, mit hohen Kosten verbundenen Entwicklungsaufwand bedeutete, sondern auch mit einer erheblichen, durch menschliches Eingreifen verursachten Fehleranfälligkeit einherging.
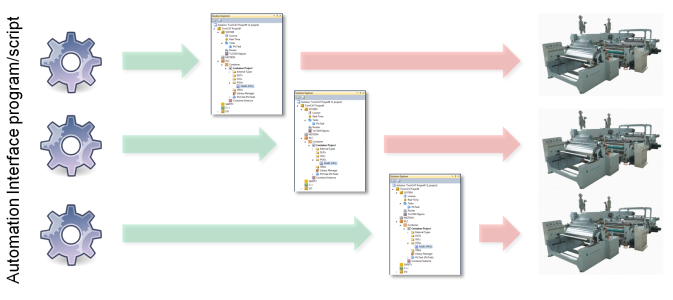
Dank des TwinCAT-Automation Interface kann der Prozess der Anpassung von TwinCAT-Konfigurationen an eine neue Umgebung oder sogar die Erstellung ganz neuer TwinCAT-Konfigurationen entsprechend den Anforderungen der Kunden automatisiert werden.
Der Leser sollte sich nun den folgenden Themen zuwenden:
Grundlagen
|
Thema |
Beschreibung |
|---|---|
|
Beschreibt, wie eine TwinCAT-Konfiguration erzeugt oder geöffnet wird. | |
|
Beschreibt, wie durch eine TwinCAT-Konfiguration navigiert wird. | |
|
Beschreibt, wie auf benutzerdefinierte Parameter eines Elements zugegriffen wird. Dies ist wichtig für den Zugriff auf die Konfigurationsparameter eines Tree Items. | |
|
Beschreibt, wie ein eigener COM-Nachrichtenfilter zu implementieren ist, um abgewiesene COM-Aufrufe zu umgehen |
Best practice
|
Thema |
Beschreibung |
|---|---|
|
Beschreibt den Umgang mit SPS-Projekten | |
|
Beschreibt den Umgang mit SPS-Objekten/Code | |
|
Beschreibt den Umgang mit SPS-Bibliotheken, Repositories und Platzhaltern | |
|
Beschreibt die Erstellung von TwinCAT Motion-Projekten (NC-Task, Achsen, ...) | |
|
Beschreibt die Erstellung von EtherCAT-Teilnehmern und deren Anschluss an eine EtherCAT-Topologie | |
|
Beschreibt den Umgang mit TwinCAT Measurement -Projekten. | |
|
Beschreibt den Umgang mit TcCOM-Modulen. | |
|
Beschreibt den Prozess der Erstellung und Verwendung von Templates. | |
|
Beschreibt die Erstellung von Netzwerkvariablen (Publisher/Subscriber-Variablen) | |
|
Beschreibt die Erstellung von Tasks und deren Verknüpfung mit anderen Objekten (SPS-Projekten, ...) | |
|
Einige I/O Geräte benötigen physikalische Adressinformationen, bevor die Konfiguration aktiviert werden kann. Dieser Artikel erläutert, wie diese Informationen beschafft und eingestellt werden. | |
|
Die Fehlerliste kann für das Debugging und die Diagnose sehr hilfreich sein | |
|
Beschreibt den Zugriff auf Visual Studio Fenster. | |
|
Beschreibt die Verwendung verschiedener Versionen von Visual Studio für das Automation Interface. | |
|
Beschreibt, wie Sie sich mit bestehenden (bereits laufenden) Visual Studio-Instanzen verbinden können, um das Automation Interface zu verwenden. | |
|
Beschreibt die Einstellung der TwinCAT-Zielplattform zur Kompilierung. |
Darüber hinaus enthält diese Dokumentation eine vollständige API-Referenz aller Schnittstellen. In den Abschnitten Wie... und Beispiel finden Sie eine lose Zusammenstellung von Skriptcodefragmenten, Konfigurationsschritten und Beispielprojekten. Sie umfassen zudem eine unsortierte und wachsende Liste von „realen“ Beispielen.