Grundlagen zur Funktion
Die Messfunktion der EP3356-0022 lässt sich wie folgt beschreiben:
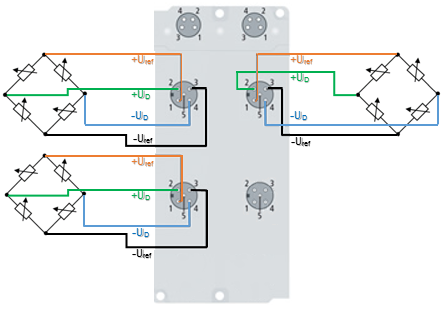
- Mit der EP3356-0022 wird die Versorgungsspannung einer Wägezelle als Referenzspannung und auch die der Krafteinwirkung proportionale Differenzspannung erfasst.
- Es muss eine Vollbrücke angeschlossen werden. Steht nur eine Viertel- oder Halbbrücke zur Verfügung, müssen externe Ergänzungsbrücken hinzugefügt werden. Der Nennkennwert ist dann entsprechend zu modifizieren.
- Die Messung der Referenz- und Differenzspannung erfolgt zeitgleich
- Die Veränderung des Quotienten aus Differenz- und Referenzspannung entspricht der relativen Krafteinwirkung auf die Wägezelle.
- Der Quotient wird in Gewicht umgerechnet und als Prozessdatum ausgegeben.
- Die Datenverarbeitung unterliegt folgenden Filtervorgängen:
- der Analogwandler (ADC) integriert über 76 Samples
- Mittelwertbildung im Averager (wenn aktiviert)
- Softwarefilter IIR/FIR (wenn aktiviert)
- Die EP3356-0022 verfügt über einen automatischen Abgleich/Selbstkalibrierung
- Werkseinstellung: aktivierte Selbstkalibrierung, Durchführung alle 3 Minuten
- Abweichungen der verwendeten Analogeingangsstufen (Temperatur-, Langzeitdrift usw.) werden durch automatische regelmäßige Kalibrierungen überprüft und innerhalb des zulässigen Toleranzbereiches ausgeglichen.
- die Automatik ist abschaltbar bzw. kontrolliert ansteuerbar
- Die EP3356-0022 kann auch als 2-kanalige analoge Eingangsbox zur Spannungsmessung verwendet werden.
- Die EP3356-0022 verfügt über eine aktivierbare Zeitstempelfunktion durch Distributed Clocks. Im DC-Modus sind die Filterfunktionen außer Betrieb.
Allgemeine Hinweise
- Der Messbereich sollte immer so weit wie möglich ausgenutzt werden, um eine hohe Messgenauigkeit zu erreichen.
- Ein Parallelbetrieb von Wägezellen ist mit der EP3356-0022 möglich. Dabei ist zu beachten:
- es sollten vom Wägezellen-Hersteller entsprechend für den Parallelbetrieb freigegebene und abgeglichene Wägezellen verwendet werden. Die Nennkennwerte [mV/V], Nulloffset [mV/V] und Impedanz [Ω, Ohm] werden dann üblicherweise entsprechend angeglichen.
- Wägezellen-Signale sind von geringer Amplitude und mitunter sehr empfindlich für EMV-Störungen. In Anbetracht der anlagentypischen Besonderheiten und unter Berücksichtigung der technischen Möglichkeiten sind zielführende EMV-Schutzmaßnahmen nach dem Stand der Technik anzuwenden. Unter hoher EMV-Störbelastung kann es hilfreich sein, den Kabelschirm vor der Box noch zusätzlich mit geeignetem Schirmmaterial aufzulegen.
- Soll die EP3356-0022 im Distributed Clocks-Betrieb genutzt werden:
- DC aktivieren
- Prozessdatum Timestamp aktivieren. Die Filterfunktionen sind dann außer Betrieb.
Signalflussplan
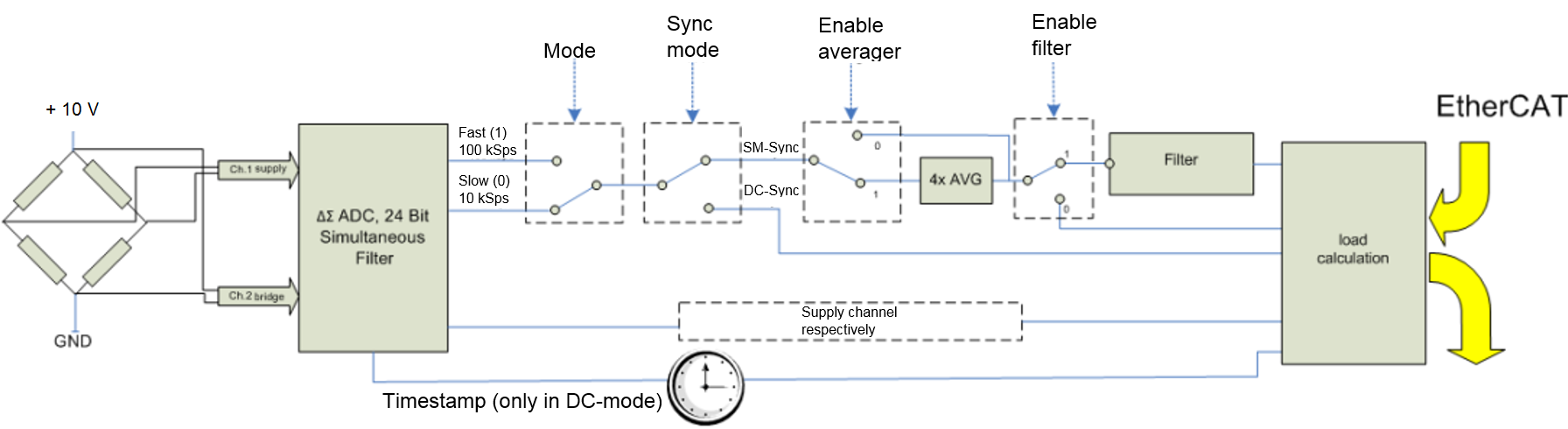
Die EP3356-0022 bearbeitet die Daten in folgender Reihenfolge:
- Hardware-Tiefpass 10 kHz
- 2-kanaliges simultanes Sampling in 10,5/105,5 kSps mit 64-facher Überabtastung durch Delta-Sigma-(ΔΣ)-Wandler und interner Vorfilterung
- Averager 4-fach (deaktivierbar)
- Software-Filter (deaktivierbar)
- Gewichtsberechnung
 | Messprinzip Delta-Sigma-(ΔΣ)-Wandler Das in der EP3356-0022 verwendete Messprinzip mit realer Abtastung im MHz-Bereich verschiebt Aliasing-Effekte in einen sehr hochfrequenten Bereich, so dass für den Betrieb im kHz-Bereich in der Regel keine derartigen Effekte zu erwarten sind. |
Averager
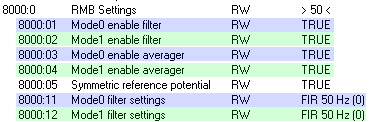
Um die hohe Datenrate des Analog-Digital-Wandlers (ADC) auch bei langsamen Zykluszeiten nutzen zu können, ist dem ADC ein Mittelwertfilter nachgeschaltet. Dieser bildet einen gleitenden Mittelwert über die letzten 4 Messwerte. Diese Funktion lässt sich über das CoE-Objekt "Mode X enable averager" für jeden Modus deaktivieren.
Software-Filter
Die EP3356-0022 ist mit einem digitalen Software-Filter ausgestattet, das je nach Einstellung die Charakteristik eines Filter mit endlicher Impulsantwort (Finite Impulse Response filter, FIR-Filter) oder eines Filter mit unendlicher Impulsantwort (Infinite Impulse Response filter, IIR-Filter), annehmen kann. Der Filter ist per default als 50 Hz-FIR aktiviert.
Im jeweiligen Messmodus kann der Filter aktiviert (0x8000:01, 0x8000:02) und parametriert (0x8000:11, 0x8000:12) werden.
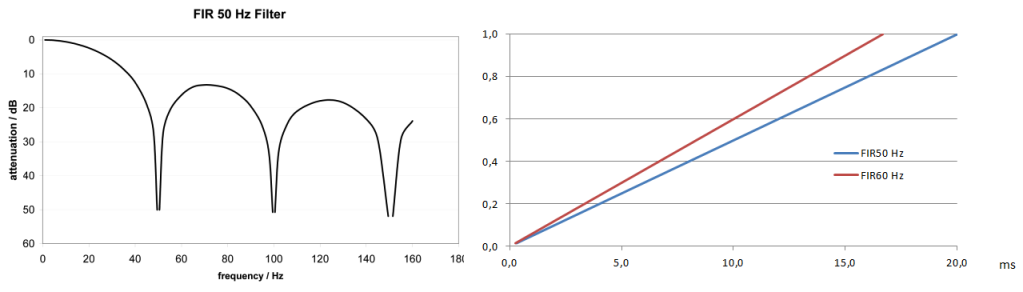
FIR 50/60 Hz
- Der Filter arbeitet als Notch-Filter (Kerbfilter) und bestimmt die Wandlungszeit der Box. Je höher die Filterfrequenz, desto schneller ist die Wandlungszeit. Es steht ein 50 Hz und ein 60 Hz Filter zur Verfügung. Kerbfilter bedeutet, dass der Filter bei der genannten Filterfrequenz und Vielfachen davon Nullstellen (Kerben) im Frequenzgang hat, diese Frequenzen also in der Amplitude dämpft. Das FIR-Filter arbeitet als nicht-rekursives Filter.
PDO Filter
- Der Filter verhält sich wie die oben beschriebenen 50/60Hz FIR Filter. Jedoch lässt sich hier die Filterfrequenz in 0,1 Hz Schritten durch ein Ausgangsdatenobjekt einstellen. Der Filterfrequenzbereich reicht von 0,1 Hz bis 200 Hz und kann im laufenden Betrieb umparametriert werden. Dazu muss das PDO 0x1601 ("RMB Filter frequency") in die Prozessdaten eingeblendet und im Objekt 0x8000:11 der Eintrag "PDO Filter frequency" ausgewählt werden.
- Diese Funktion ermöglicht es, Störungen einer bekannten Frequenz aus dem Messsignal zu unterdrücken. Ein typischer Anwendungsfall ist z.B. ein Silo, welches durch eine angetriebene Schnecke befüllt und gewogen wird. Die Drehzahl der Schnecke ist bekannt und kann als Frequenz in das Objekt übernommen werden. Somit können mechanische Schwingungen aus dem Messsignal entfernt werden.
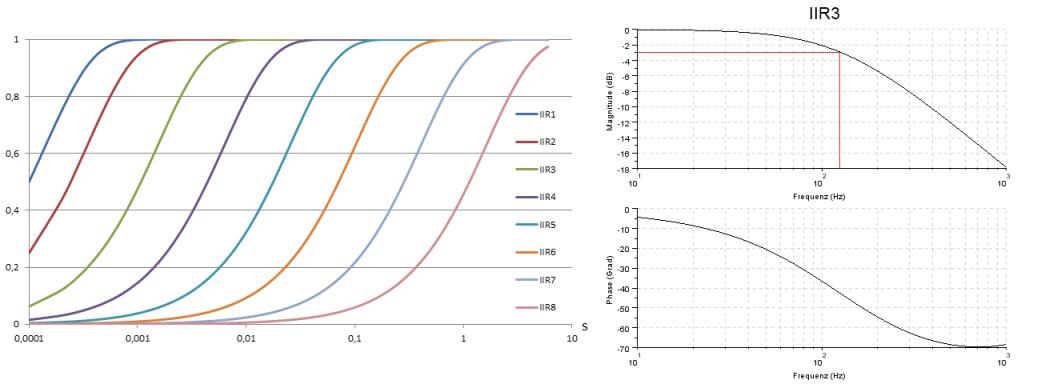
IIR-Filter 1..8
- Der Filter mit IIR-Charakteristik ist ein zeitdiskretes, lineares, zeitinvariantes Filter, welches in 8 Leveln eingestellt werden kann (Level 1 = schwaches rekursives Filter, bis Level 8 = starkes rekursives Filter). Der IIR kann als gleitende Mittelwertberechnung nach einem Tiefpass verstanden werden.
Übersicht Wandlungszeiten
Filter Settings | Wert | PDO Update-zeit | Filtereigenschaft | Grenzfrequenz (-3 dB) [Hz] (typ.) | Kommentar | Anstiegszeit 10-90 % [s] (typ.) |
|---|---|---|---|---|---|---|
Filter deaktiviert | - | Zyklussynchron, min. 100 µs | - | - | - | - |
0 | FIR 50 Hz | 312.5 µs | 50 Hz Notchfilter | 22 Hz | Wandlungszeit typ. 312.5 µs | 0.013 |
1 | FIR 60 Hz | 260.4 µs | 60 Hz Notchfilter | 25 Hz | Wandlungszeit typ. 260.4 µs | 0.016 |
2 | IIR1 | Zyklussynchron (bis min. 100 µs) | Tiefpass | 2000 Hz | a0=1/21 = 0.5 | 0.0003 |
3 | IIR2 | Tiefpass | 500 Hz | a0=1/22 = 0.25 | 0.0008 | |
4 | IIR3 | Tiefpass | 125 Hz | a0=1/24 = 62.5e-3 | 0.0035 | |
5 | IIR4 | Tiefpass | 30 Hz | a0=1/26 = 15.6e-3 | 0.014 | |
6 | IIR5 | Tiefpass | 8 Hz | a0=1/28 = 3.91e-3 | 0.056 | |
7 | IIR6 | Tiefpass | 2 Hz | a0=1/210 = 977e-6 | 0.225 | |
8 | IIR7 | Tiefpass | 0.5 Hz | a0=1/212 = 244e-6 | 0.9 | |
9 | IIR8 | Tiefpass | 0.1 Hz | a0=1/214 = 61.0e-6 | 3.6 | |
10 | Dynamic IIR | Der Filter wechselt dynamisch zwischen den Filtern IIR1 bis IIR8 | ||||
11 | PDO Filter frequency | 1/PDO Value[Hz]*64 | Notchfilter mit einstellbarer Frequenz | ca. 0,443 * PDO Value [Hz] | - | - |
| Filter und Zykluszeit Bei eingeschalteten FIR Filtern (50 Hz oder 60 Hz) werden die Prozessdaten maximal mit der angegebenen Wandlungszeit aktualisiert (siehe Tabelle). Die IIR Filter arbeiten zyklussynchron. Somit steht jedem SPS-Zyklus ein neuer Messwert zur Verfügung. |
An welcher Stelle die Filter eingestellt werden können ist in dem Kapitel „CoE-Objektbeschreibung und Parametrierung“ z.B. unter dem Index 0x8000:12 beschrieben.
| IIR Filter Differenzengleichung: Yn= Xn * a0 + Yn-1 * b1 mit a0 + b1 = 1 a0= (siehe Tabelle), b1 = 1 – a0 |
Dynamisches IIR Filter
Das dynamische IIR-Filter schaltet in Abhängigkeit der Gewichtsänderung eigenständig die 8 verschiedenen IIR-Filter durch. Das Konzept:
- Zielzustand ist immer der IIR8-Filter, also die größtmögliche Dämpfung und somit ein sehr beruhigter Messwert.
- Bei schnellen Änderungen der Eingangsgröße wird der Filter geöffnet also zum nächstniedrigeren Filter geschaltet (wenn noch möglich). Dadurch wird der Signalflanke mehr Gewicht gegeben und der Messwertverlauf kann schnell der Last folgen.
- Bei geringer Messwertänderung wird der Filter zugezogen, also zum nächsthöheren Filter geschaltet (wenn noch möglich). Dadurch wird der statische Zustand mit einer hohen Genauigkeit abgebildet.
- Die Bewertung ob eine Filteränderung nach unten erforderlich bzw. nach oben möglich ist, erfolgt fortlaufend in festem Zeitabstand.
Die Parametrierung wird über die CoE Enträge 0x8000:13 und 0x8000:14 vorgenommen. Die Bewertung erfolgt nach 2 Parametern:
- Im Objekt "Dynamic filter change time" (0x8000:13) wird eingestellt, in welchem Zeitabstand das vorliegende Signal neu bewertet wird
- Im Objekt 0x8000:14 wird festgelegt, welche maximale Abweichung in dieser Zeit zulässig ist, ohne dass es zu einer Filterumschaltung kommt.
Beispiel:
Der dynamische Filter soll derart eingestellt werden, dass eine maximale Steigung von 0.5 digit pro 100 ms (5 Digit pro Sekunde) möglich ist, ohne dass der Filter geöffnet wird. Dadurch wird eine "ruhige" Messwertausgabe erreicht. Bei schnellerer Änderung soll aber umgehend der Last gefolgt werden können.
- Dynamic filter change time (0x8000:13) = 10 (entspricht 100 ms)
- Dynamic filter delta (0x8000:14) = 0.5 (bezogen auf den berechneten Lastwert)
Im Folgenden ist der Messwertverlauf bei langsamer (links) und schneller (rechts) Änderung abgebildet.
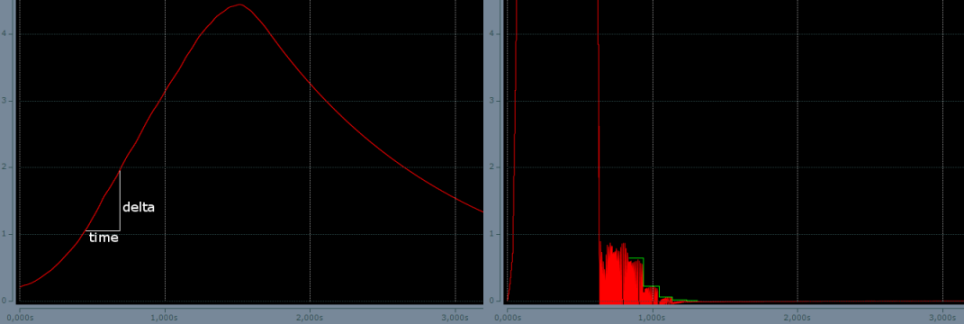
- Links: Die Waage wird langsam belastet. Die Änderung des Gewichtes (delta/time) bleibt unterhalb der Marke von 0.5 Digit pro 100 ms. Der Filter bleibt somit unverändert auf der stärksten Stufe (IIR8) und bewirkt einen schwankungsarmen Messwert.
- Rechts: Die Waage wird schlagartig belastet. Die Änderung des Gewichtes überschreitet sofort den Grenzwert von 0.5 Digit pro 100 ms. Der Filter wird alle 100 ms um eine Stufe geöffnet (IIR8 → IIR7 → IIR6 ...) und der Anzeigewert folgt sofort dem Sprung. Nach der Entfernung des Gewichtes fällt das Signal zügig wieder ab. Ist die Änderung des Gewichtes kleiner als 0.5 Digit pro 100 ms, wird der Filter alle 100 ms eine Stufe stärker gestellt bis IIR8 erreicht wird. Die grüne Linie soll den abnehmenden "Rauschpegel" verdeutlichen.
Gewichtsberechnung
Nach jeder Erfassung der Analogeingänge erfolgt die Berechnung des resultierenden Gewichts bzw. der resultierenden Kraft, welche sich aus dem Verhältnis des Messsignals zum Referenzsignal und aus mehreren Kalibrierungen zusammensetzt:
YR = (UDiff / Uref) x Ai | (1.0) | Berechnung des Rohwertes in mV/V |
YL = ( (YR – CZB) / (Cn – CZB) ) * Emax | (1.1) | Berechnung des Gewichts |
YS = YL * AS | (1.2) | Skalierfaktor (z.B. Faktor 1000 für Umskalierung von kg in g) |
YG = YS * (G / 9.80665) | (1.3) | Einfluss der Erdbeschleunigung |
YAUS = YG x Gain - Tara | (1.4) | Gain und Tara |
Legende
Name | Bezeichnung | CoE Index |
|---|---|---|
UDiff | Brückenspannung/Differenzspannung des Sensorelementes, nach Averager und Filter |
|
Uref | Brückenspeisespannung/Referenzsignal des Sensorelementes, nach Averager und Filter |
|
Ai | Interne Verstärkung, nicht veränderbar. Dieser Faktor berücksichtigt die Einheitennormierung von mV zu V und die unterschiedlichen Vollausschläge der Eingangskanäle |
|
Cn | Nennkennwert des Sensorelementes (Einheit mV/V, z.B. nominell 2 mV/V oder 2.0234 mV/V laut Abgleichprotokoll) | |
CZB | Nullpunktabgleich (Zero balance) des Sensorelementes (Einheit mV/V, z.B. -0.0142 laut Abgleichprotokoll) | |
Emax | Nennlast des Sensorelementes | |
AS | Skalierfaktor (z.B. Faktor 1000 für Umskalierung in kg in g) | |
G | Erdbeschleunigung in m/s^2 (default: 9.80665 ms/s^2) | |
Gain |
| |
Tara |
|
Wandlungsmodus
Der so genannte Wandlungsmodus bestimmt die Geschwindigkeit und Latenz der analogen Messung in der EP3356-0022. Die Charakteristika:
Modus | Bedeutung | typ. Latenz | Stromaufnahme typ. |
|---|---|---|---|
0 | High precision Analoge Wandlung mit 10,5 kSps (Samples per second) Langsame Wandlung und damit hohe Genauigkeit | 7,2 ms | 70 % (bez. Nennwert, siehe Technische Daten) |
1 | High speed / low latency Analoge Wandlung mit 105,5 kSps (Samples per second) schnelle Wandlung bei geringer Latenz | 0,72 ms | 100 % (bez. Nennwert, siehe Technische Daten) |
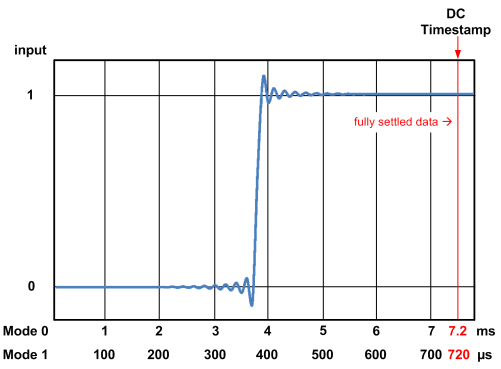
Das Wandlungsprinzip der EP3356-0022 bedingt, dass erst nach einer definierten Zeit die analoge Spannung als Digitalwert zur Verfügung steht. Dies veranschaulicht die nachfolgende Abbildung.
Es wird ein Sprungsignal 0 →1 auf den Eingang gegeben. Je nach Wandlungsmodus 0/1 ist nach 7,2 ms bzw. 0,72 ms der Messwert innerhalb der definierten Genauigkeit erreicht und auslesbar. Zu diesem Zeitpunkt wird auch im Distributed Clocks-Betrieb der Zeitstempel gewonnen. Im realen Betrieb wird üblicherweise kein sprungbehaftetes sondern ein höherfrequentes, wenn auch stetiges Signal angeschlossen. Dann bildet die EP3356-0022 das Eingangssignal mit der entsprechenden Latenz zur Weiterverarbeitung ab, weshalb auch eine schnellere Abfrage der Abtasteinheit in kürzeren Abständen als die Latenzzeit (Die EP3356-0022 ermöglicht bis 100 µs) zur detailgetreuen Abbildung des analogen Eingangssignals sinnvoll ist.
Eine Veränderung der angegebenen Latenzzeit ist nicht möglich.
Darüber hinaus sind in jedem Modus über CoE einzeln einstellbar
- Aktivierung Averager
- Aktivierung Filter
- Filterart
Moduswechsel
Insbesondere für dynamische Wägevorgänge kann es sinnvoll sein, während des Wägevorgangs die Messcharakteristik erheblich zu verändern. Wenn z. B. ein Schüttgut sackweise innerhalb 5 Sekunden abgefüllt wird, sollte zu anfangs ein sehr offener Filter eingesetzt werden, damit der Messwert schnell dem Füllungsgrad folgt. Dass der Messwert dabei sehr ungenau ist und hohen Schwankungen unterliegt, spielt während dieser Phase keine Rolle. Wenn der Sack dann zu >90 % befüllt ist, muss die Befüllung verlangsamt und mit hoher Genauigkeit die Beladung verfolgt werden, der Filter ist nun "zuzuziehen". Deshalb können in der EP3356-0022 die beiden Wandlungsmodi über das Prozessdatenbit "Sample mode" in Bezug auf die Analogwertverarbeitung umgeschaltet werden.
Der Moduswechsel dauert ca. 30 ms, in dieser Zeit sind die Messwerte ungültig und zeigen dies durch das Statusbyte an.