Geschwindigkeit-Korrektur-Regelung
Bei gleichzeitiger Aktivierung der PDOs “STM Position” (0x1603) und “STM Velocity” (0x1604) wird eine Geschwindigkeits-Korrektur-Regelung auf den analogen Messwert 1 aktiviert (vgl. Bild).
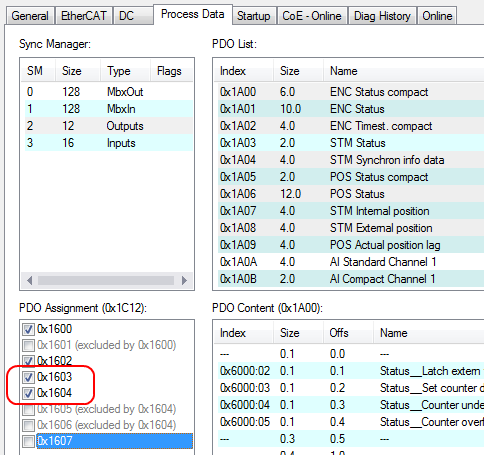 Abb.182: PDOs aktivieren
Abb.182: PDOs aktivierenDie grundsätzliche Geschwindigkeitsvorgabe geschieht über das PDO “STM Velocity/Velocity”. Der Istwert der Regelung wird vom PDO “AI Standard Channel 1/Value” geliefert. Der Sollwert wird über das PDO “STM Position/Position” vorgegeben. (vgl. Bild)
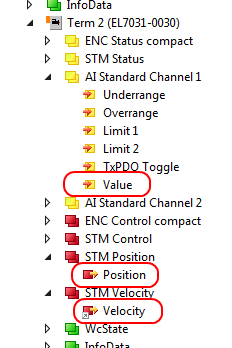 Abb.183: notwendige PDOs
Abb.183: notwendige PDOsIst die Sollwertvorgabe Null, so ist die Regelung deaktiviert. Ist der Sollwert größer Null, ist die Regelung aktiv und es wird je nach Regelfehler ein Geschwindigkeits-Offset generiert, welcher mit der Geschwindigkeits-Vorgabe akkumuliert wird.
Achtung: Das Offset kann auch negativ werden!
Ein Drehrichtungswechsel wird unterdrückt. Das bedeutet, die Geschwindigkeit kann minimal auf Null heruntergeregelt werden.
Die Regelparameter des PI-Reglers werden durch den Index 0x8013:01 Kp factor (velo./pos.) bzw. Index 0x8013:02 Ki factor (velo./pos.) vorgegeben. Index 0x8013:06 Filter cut off frequency (velo./pos.) wird zur Begrenzung der Reglerausgabe genutzt. (vgl. Bild)
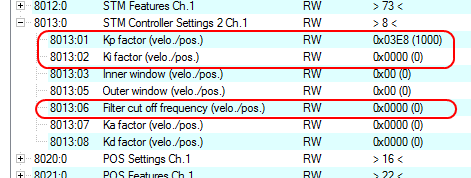 Abb.184: Reglerparameter
Abb.184: ReglerparameterDer Bezug ist bei der Geschwindigkeits-Vorgabe und der Begrenzung immer dieser: +/- 100% entspricht +/- 32767
Weiter ist zu beachten, dass der Index 0x8012:01 Operation mode auf “Automatic” eingestellt ist (vgl. Bild).
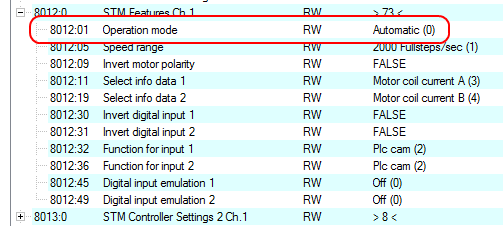 Abb.185: Operation Mode
Abb.185: Operation Mode