Hinweise zur Inbetriebnahme
Über TwinCAT kann auf Basis des EtherCAT-Protokolls auf Softwarefunktionen zugegriffen werden. Die Prozessdatenobjekte (PDOs) bieten Zugriff auf die wichtigen Datenausgaben des Moduls. Weitere Einstellungen und Informationen können per CANopen over EtherCAT (CoE) ausgelesen bzw. stellenweise geschrieben werden.
AC Betrieb
Die Klemme übernimmt die Kommunikation für einen AC-Ladevorgang zwischen ihr (bzw. der in der Kundenapplikation umgesetzten Ladesäulen-Funktion, Electrical Vehicle Supply Equipment (EVSE)) und einem Electrical Vehicle (EV) via PWM-Kommunikation nach IEC 61851 und High-Level-Kommunikation nach ISO 15118.
DC Betrieb
Die Klemme übernimmt die Kommunikation für einen DC-Ladevorgang zwischen ihr (bzw. der in der Kundenapplikation umgesetzten Ladesäulen-Funktion, Electrical Vehicle Supply Equipment (EVSE)) und einem Electrical Vehicle (EV) via PWM-Kommunikation nach IEC 61851 und High-Level-Kommunikation nach ISO 15118.
Plug Type Einstellung
Mit Hilfe dieser Einstellungsmöglichkeit kann in der Applikation ausgewählt werden, welcher Typ von Ladekonfiguration genutzt wird: Type 1 oder Type 2.
High-/Low-Level-Kommunikation
Über die PDO-Einstellung lässt sich die Darstellung der Kommunikationseben zwischen High- und Low-Level bzw. Gleich-(DC) und Wechselspannungs-(AC)-Laden einstellen:
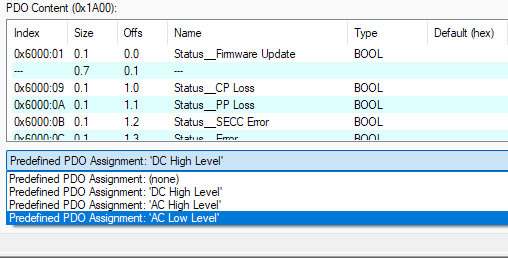 Abb.86: Predefined PDO
Abb.86: Predefined PDOVerhalten bei PP/CP-Verlust
Es wird die Amplitude des Pilotsignals CP (Control Pilot) und des Proximity Pilots (PP) ausgewertet. Da die CP/PP-Loss-Funktionen weitgehend in Hardware ausgeführt sind, können Zustandsübergänge und Fehlerzustände (z.B. Drahtbruch) im Ladevorgang damit sehr schnell erkannt und signalisiert werden.
Sie können das die CP/PP-Loss-Funktionen nutzen, um die normativ geforderten Abschaltzeiten einzuhalten. Stellen Sie dazu applikativ sicher, dass nach dem Auslösen der CP/PP-Loss Signale der Leistungsfluss innerhalb der normativ geforderten Abschaltzeiten unterbrochen und die Ladeleitung leistungslos bzw. spannungsfrei wird (siehe IEC 61851-23).
Beispielbeschaltung EL6761
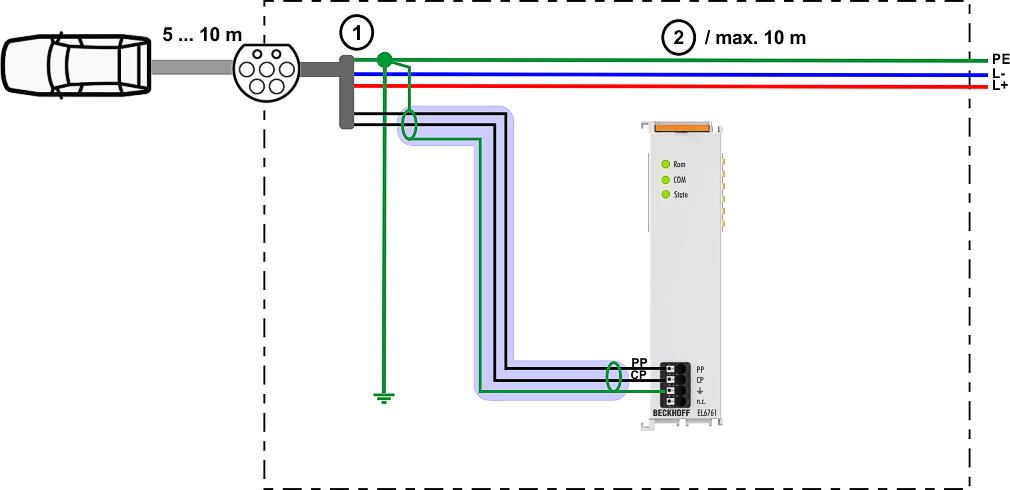 Abb.87: Beispielbeschaltung EL6761
Abb.87: Beispielbeschaltung EL6761Punkt 1 – gemeinsame Erdung
Punkt 2 – die geschirmte Leistung für die Weiterleitung des CP-Signals sollte nicht länger als 15 m sein, da die Gesamtleitung normativ auf 30 m begrenzt ist. Die restliche Länge kann für die Leitung zum EV genutzt werden.
Die Klemme EL6761 ist ausschließlich zur Kommunikationsbereitstellung zwischen ihr (bzw. der in der Kundenapplikation umgesetzten Ladesäulen-Funktion, EVSE) und einem EV gedacht. Für eine Ladesäulen-Funktion fehlen viele weitere Funktionen, wie z.B. die Bereitstellung der Leistungselektronik, um für den eigentlich gewünschten Energietransfer zu sorgen.
Hinweis | |
Zykluszeit EtherCAT Für eine optimale Diagnose, wird empfohlen, die zusätzlichen Diagonse-PDOs mit einer Zykluszeit von 1 ms einzusammeln. |
Cable Type CoE-Parameter
| Typ1 | Typ2 |
|---|---|---|
DC | PP-Erkennung obligatorisch (CCS1) gemäß SAE J1772 -> Parameter wird ignoriert und die PP-Erkennung durchgeführt | Keine PP-Erkennung (IEC 61851) -> Parameter wird ignoriert, und die PP-Erkennung nicht durchgeführt |
AC | Typ 1-Kabel mit AC fest angeschlossen: PP-Erkennung optional gem. SAE J1772 -> hängt von der Konfiguration ab, ob wir PP erkannt wirdoder nicht | Fest angeschlossenes Kabel: Keine PP-Erkennung (IEC 61851) (Maximalstrom des Kabels sollte dem Host-Controller bekannt sein, der den Maximalstrom sendet) -> Parameter muss auf PP-Erkennung „off“ eingestellt werden ___________________________________ Loses Kabel: PP-Erkennung zur Bestimmung des Kodierwiderstandes im Kabel für den max. Strom des Kabels (IEC 61851) -> Parameter muss auf PP-Erkennung „on“ eingestellt sein |
CP-Loss ist speichernd
- Wird im State C oder D ausgewertet und ggf. als Fehler ausgegeben
- CP muss abgesteckt und wieder durch State B gehen, dann wird der Fehler erst wieder gelöscht
 | Authentifizierungsphase und PreCharge-Phase Folgendes gilt zu beachten: |
| Parametereinstellung nur in „PreOP“-Mode Folgendes gilt zu beachten: |