Beispiel 1
Im ersten Beispiel wird eine Basiskommunikation zwischen EVSE und EV auf Basis der IEC 61851-Low-Level-Kommunikation unter Verwendung der EtherCAT-Klemme EL6761 implementiert.
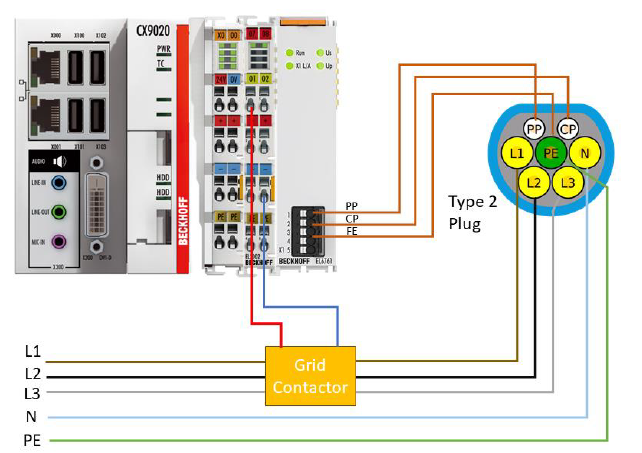 Abb.88: Beispielhafter Aufbau: der Aufbau ist im Hinblick auf Sicherheitsmerkmale wie Fehlerstromschutz vereinfacht.
Abb.88: Beispielhafter Aufbau: der Aufbau ist im Hinblick auf Sicherheitsmerkmale wie Fehlerstromschutz vereinfacht.Um die Klemme für Low-Level-Kommunikation zu nutzen, wird in TwinCATdie vordefinierte PDO-Einstellung „AC Low Level“ gewählt.
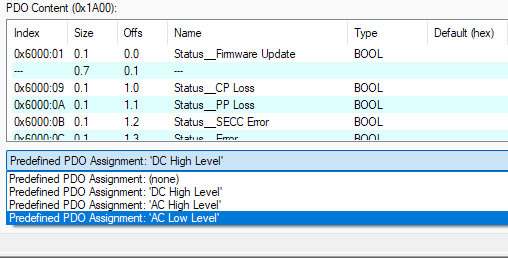 Abb.86: Predefined PDO „AC Low Level”
Abb.86: Predefined PDO „AC Low Level”Darüber hinaus wird die Klemme über CoE Index 8000 (SECC-Settings) wie im Bild „Einstellungen Index 8000“ dargestellt, konfiguriert.
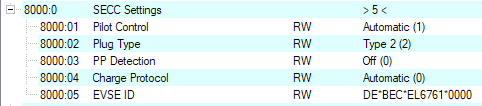 Abb.90: Einstellungen Index 8000
Abb.90: Einstellungen Index 8000Um die Kommunikation in TwinCAT aufzubauen, behandelt eine durch Switch-Case- Bestimmung realisierte Statusmaschine die Zustände des Control-Pilot-State-Eingangs-PDO. Das resultierende Statusdiagramm ist in Abbildung „Statusfolge der Pilot-State-Machine“ dargestellt.
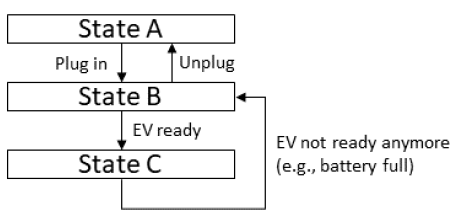 Abb.91: Statusfolge der Pilot-State-Machine
Abb.91: Statusfolge der Pilot-State-MachineSobald die Klemme mit dem EV verbunden ist, wechselt sie das PDO von Status A nach Status B, wie oben dargestellt. Sobald die Verbindung erfolgreich hergestellt wurde und das Fahrzeug zum Laden bereit ist (Wechsel der State-Machine zu Status C), kann das Netzschütz eingeschaltet und der Ladevorgang gestartet werden. Nachdem die Batterie vollständig geladen ist, wechselt der Status wieder nach B.