Grundlagen zur Funktion
Betriebsmodi der EL2522
Die EL2522 unterstützt neben den von der EL2521 bekannten "erweiterten Betriebsmodus" auch einen "erweiterten Betriebsmodus mit kontinuierlicher Positionsvorgabe" und einen "erweiterten Betriebsmodus mit kontinuierlicher Positionsvorgabe und Ankunftszeit".
Als Erweiterung zur EL2521 wird bei der EL2522 der "erweiterte Betriebsmodus" im 1-Kanal bzw. einfachen Betriebsmodus mit A, B und C-Spur („Nullspur“ / Referenz) oder im 2-Kanal bzw. zweifach Betriebsmodus jeweils mit A und B-Spur angeboten.
Version | PDO settings | Bemerkungen | ESI | Prozessdaten | CoE-Parameter | |
|---|---|---|---|---|---|---|
Legacy | ehemals MDP 252 | für die EL2522 nicht verfügbar | - | - | - | - |
erweiterter Betriebsmodus | 1 Ch. Standard 16 Bit (MDP 253/511) 2 Ch. Standard 16 Bit (MDP 253/511) 1 Ch. Standard 32 Bit (MDP 253/511) 2 Ch. Standard 32 Bit (MDP 253/511) | 1 Ch.: mit C-Spur | ab 02 | ab EL2522-0000 | PDO-Zuordnung Inputs: 0x1A00, 0x1A02 Outputs: 0x1600, 0x1602, 0x160A | Feature Bits und Settings in CoE-Objekten (hex) 8000, 8010, 8020 und 8030 |
erweiterter Betriebsmodus mit kontinuierlicher Positionsvorgabe | 1 Ch. Standard 32 Bit (MDP 253/511), continues position 2 Ch. Standard 32 Bit (MDP 253/511), continues position | 1 Ch.: mit C-Spur; Fahrweg ohne Rampe, DC Synchron muss ausgewählt sein | ab 02 | ab EL2522-0000 | PDO-Zuordnung Inputs: 0x1A03 | |
erweiterter Betriebsmodus mit kontinuierlicher Positionsvorgabe und Ankunftszeit | 1 Ch. Standard 32 Bit (MDP 253/511), 2 Ch. Standard 32 Bit (MDP 253/511), | 1 Ch.: mit C-Spur; Fahrweg ohne Rampe, Vorgabe von Ankunftszeit möglich(Sollzeitpunkt); DC Synchron muss ausgewählt sein | ab 02 | ab El2522-0000 | PDO-Zuordnung Inputs: 0x1A03 |
Ausgabemodi der EL2522
Die EL2522 verfügt über drei verschiedene Ausgabemodi. Über den Index 0x8000:0E für Inkremental-Encoder 1 bzw. den Index 0x8010:0E für Inkremental-Encoder 2 kann zwischen folgenden Ausgabemodi gewählt werden:
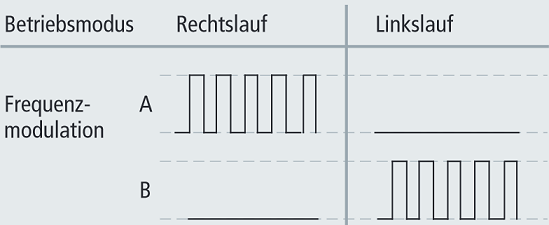
- „Frequenzmodulation (Wert: 0)",
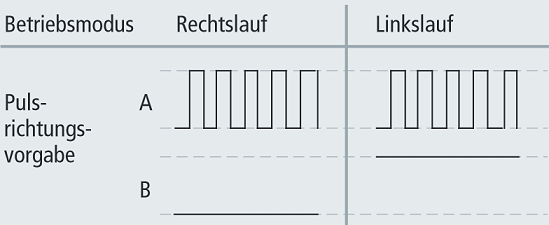
- "Pulsrichtungsvorgabe (Wert: 1)" und
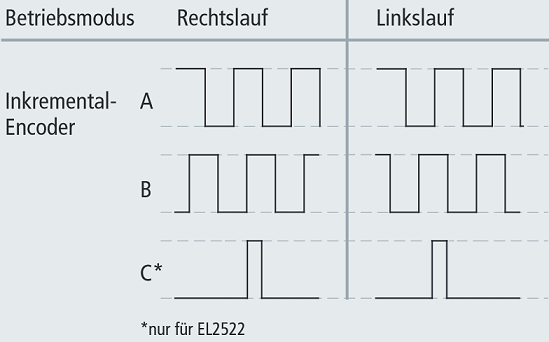
- "Inkremental-Encoder (Wert: 2)".
Zudem arbeitet die EL2522 bei Nutzung der „continues position“ PDO - Vorgaben Zyklussynchron und erzeugt damit zielgenaue Ausgabe-Steuerungstakte synchron zum Taskzyklus.
Mit der zusätzlichen Auswahl „continues position w. arrival time“ wird anstelle der Vorgabe einer Frequenz eine Zielzeit vorgegeben, in der eine Zielposition zu erreichen ist. Solange sich diese Vorgabe im plausiblen Bereich befindet, werden auch hier die Takte Zyklussynchron ausgegeben.
Ausgabemodi | Bedeutung | Index 0x8000:0E Wert |
|
|---|---|---|---|
Freuqenzmodulation | Es ist jeweils nur ein Kanal pro Richtung aktiv. Auf diesem wird ein frequenzmoduliertes Signal ausgegeben. | 0 |
|
Pulsrichtungsvorgabe | Die Richtung wird über den Kanal B gesteuert. Ein Rechtslauf wird über einen Low-Pegel und der Linkslauf über einen High-Pegel dargestellt. Das eigentliche Signal wird wiederum moduliert über den Kanal A ausgegeben. | 1 |
|
Inkremental-Encoder | Die Richtung wird hierbei durch die Verschiebung der Kanäle A und B definiert. Ein um 90° voreilender Kanal A deutet auf eine "vorwärts"-Bewegung. Ein um 90° voreilender Kanal B auf eine "rückwärts"-Bewegung. | 2 |
|
 | Überwachung der Prozessdaten
|
Auslieferungszustand
Unabhängig vom Hardware /Firmware -Stand meldet sich eine neu im System integrierte EL2522 im Betriebsmodus „2.Ch Standard 32 Bit (MDP 253/511)“ an.
Erweiterter Betriebsmodus: Inkremental-Encoder-Simulation
Bei dem "Erweiterten Betriebsmodus (253/511)" handelt es sich um den von der EL2521 bekannten erweiterten Betriebsmodus. Zur Erklärung der Funktionalität und der für die Inbetriebnahme notwendigen Schritte wird entsprechend auf das zugehörige Kapitel der EL2521 verwiesen (siehe auch Kapitel Funktion EL2521).
Im Unterschied zur EL2521 kann wahlweise zwischen einem 1-Kanal und 2-Kanal Betriebsmodus ausgewählt (einfach oder zweifachbetrieb) werden.
- Im 1-Kanal Betriebsmodus wird zusätzlich zur A und B-Spur eine C-Spur ausgegeben.
- Im 2-Kanal Betriebsmodus werden je zwei Ausgänge mit jeweils eine A und B-Spur angeboten. Beide verhalten sich hierbei analog zu dem bisher bekannten 1-Kanal Betriebsmodus.
Erweiterter Betriebsmodus: Inkremental-Encoder-Simulation mit kontinuierlicher Positionsvorgabe
Die EL2522 kann in den Betriebsmodi „1 Ch. Standard 32 Bit, continues Position“ und „2 Ch. Standard 32 Bit, continues Position“ einen Inkremental-Encoder mit A, B, C-Spur (1-Kanaliger bzw. einfacher Betriebsmodus) oder zwei unabhängige Inkremental-Encoder (2-Kanaliger bzw. zweifacher Betriebsmodus) mit jeweils A und B-Spur simulieren. Wie bisher bei der EL2521 können auch hier neben den Ausgabemodus Inkremental-Encoder Frequenzmodulation oder Pulsrichtungs-Steuerung ausgewählt werden.
Grundsätzlich werden hierbei die Takte Zyklussynchron ausgegeben (erforderliche Auswahl in den DC-Einstellungen EL2522: DC-Synchron).
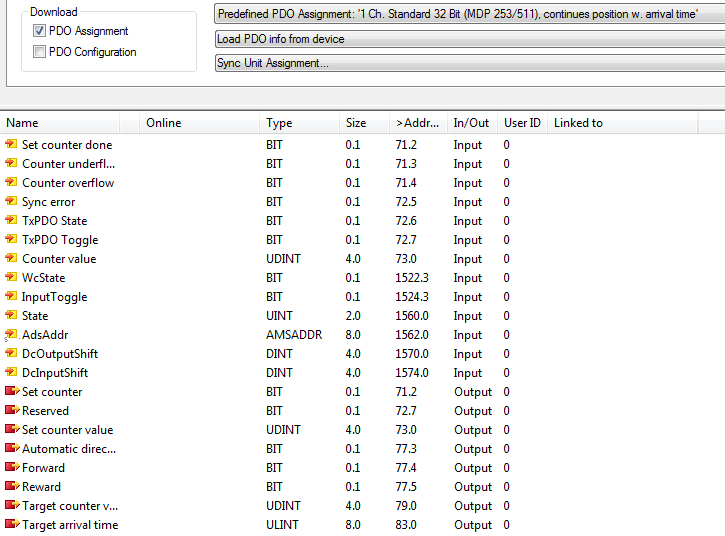
Nach Auswahl der jeweiligen PDO-Zuordnung werden die zugehörigen Prozessdaten gemäß folgender Abbildung dargestellt.
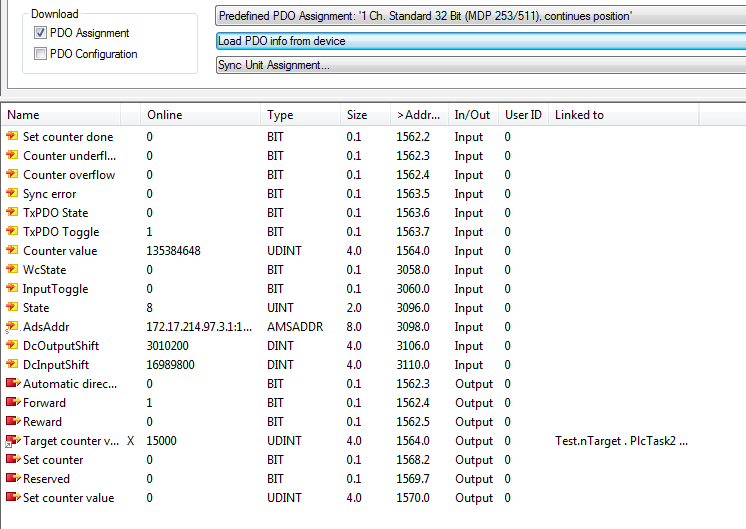
Der Ausgangswert "Target counter Value" wird mit der gewünschten Zielposition für den nächsten Zyklus beschrieben. Die EL2522 berechnet in Abhängigkeit von der aktuellen Position (Eingangswert "Counter Value") die notwendige Frequenz um die gewünschte Position im nächsten Zyklus zu erreichen. Über die Ausgangsbits "Forward" und "Reverse" kann eine feste Laufrichtung vorgegeben werden. Bei Setzen des Bits "Automatic direction" wählt die Klemme die Laufrichtung in Abhängigkeit von der Positionsdifferenz (Ist- und Sollwert) zugunsten der kürzeren Strecke.
Bei Nutzung des 2-Kanal Modus werden die Prozessdaten für den zweiten Inkremental-Encoder analog derer für den Ersten angereiht.
Erweiterter Betriebsmodus: Inkremental-Encoder-Simulation mit kontinuierlicher Positionsvorgabe und Ankunftszeit
Ergänzend zu der o.g. Funktion kann in dem Betriebsmodus "kontinuierliche Positionsvorgabe und Ankunftszeit" definiert werden wann die Zielposition erreicht werden soll. Die Berechnung erfolgt folglich nicht länger mit der Vorgabe die Zielposition im nächsten Zyklus zu erreichen sondern unter Berücksichtigung einer vom Anwender vorgegebenen Ankunftszeit.
Über den Ausgangswert "Target Arrival Time" kann die gewünschte Zielzeit zum Erreichen der Sollposition vorgegeben werden. Die Frequenz wird daraufhin entsprechend berechnet. Sollte die berechnete Frequenz über der eingestellten Maximalfrequenz liegen („Base Frequency 1“: Inkremental-Encoder 1: Index 0x8000:12 bzw. Inkremental-Encoder 2: Index 0x8010:12), so wird die Frequenz auf diesen Wert begrenzt und die Sollposition entsprechend später erreicht.
| Verwendung von Mikroinkrementen Bei der Verwendung von Mikroinkrementen ist darauf zu achten, dass die internen 100 MHz nicht überschritten werden. Beispiel: |
| Setzen des Zählerstandes / Nullabgleich (A/B-Adaptierung) Der Zählerstand kann manuell gesetzt werden. Hierzu muss der gewünschte Zählerstand in den Index 0x7020:11 (Set counter Value) eingetragen werden. Wird nun der Index 0x7020:03 (Set Counter) gesetzt, wird der Zählerstand übernommen.Hierbei müssen die Parameter für die Laufrichtung auf FALSE gesetzt sein (Automatic Direction, Forward, Backward, 0x7000:04 – 0x7000:06).Wird der Zählerstand auf den Wert "0" gesetzt, geht die C-Spur in den Zustand "High".
|
Funktion: Automatische Übernahme des Sollwertes
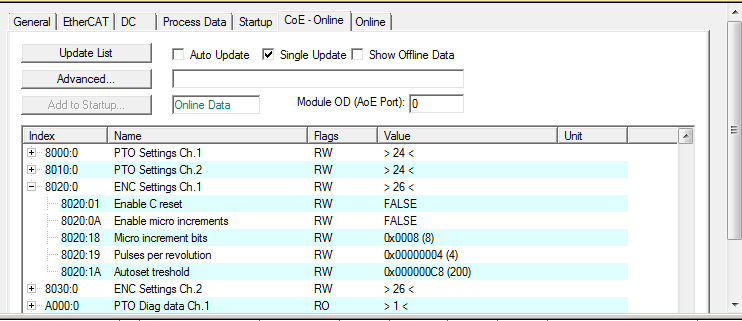
In den erweiterten Betriebsmodi "kontinuierliche Positionsvorgabe" und "kontinuierliche Positionsvorgabe mit Ankunftszeit" kann ein Schwellwert (Objekt 0x8020:1A für Inkremental-Encoder 1, Objekt 0x8030:1A für Inkremental-Encoder 2) für die automatische Übernahme von Sollwerten vorgegeben werden. Überschreitet die Differenz zwischen Sollwert und Istwert diesen voreingestellten Schwellwert, wird der Istwert beim nächsten Sync mit dem Sollwert überschrieben, d. h. dass der Wert des Zielzählers direkt als Zählerwert übernommen wird, OHNE dass dabei Inkremental-Encoder Taktsignale ausgegeben werden.
→ Um diese Funktion zu nutzen, sind die folgenden Schritte durchzuführen.
Beispiel:
- 0x8020:1A = "Autoset treshold" = 0x00000100
- (→ der Wert ist >=1: Autoset Treshold, das „Automatisches setzen“ ist aktiviert)
- Zyklus n (Setzen des Zielzählerstandes):
- "Target counter value" = 0x00000200
- "Counter value" = 0x00000000
→ Schwelle zum automatischen setzen ist überschritten, es werden KEINE Taktsignale auf den Ausgang der Klemme ausgegeben.
- Der Zielzählerstand "Target counter Value" wird direkt in den Zählerstand „Counter value“ übernommen.
- "Target counter value" = 0x00000200
- "Counter value" = 0x00000200
- Zyklus n+1 (Erneutes Setzen des Zielzählerstandes):
- "Target counter value" = 0x00000220
- "Counter value" = 0x00000200
Die Schwelle (0x00000100) ist mit der Differenz zwischen Zielzählerstand und aktuellem Zählerstand (hier der Wert: 0x20) zum automatischen Setzen NICHT überschritten. Daher werden Taktsignale auf dem Ausgang der Klemme ausgegeben bis der Zielzählerstand erreicht ist.
- Zyklus n+2 (Fortsetzung in diesem Betriebsmodus mit weiteren Zielzählerständen):
- "Target counter value" = 0x????????
- "Counter value" = 0x00000220
Diese Funktion ermöglicht es demnach alternativ zur Verwendung des Objektes 0x7020:03 (bzw. 0x7030:03) „Set counter“ den Zählerstand direkt zu setzen.
Es wird empfohlen die Funktion der automatischen Übernahme des Sollwertes nur in besonderen Ausnahmefällen anzuwenden!
| Initialisierung Der Istwert wird im Rahmen des Übergangs von SafeOp auf Op initialisiert. Hierbei wird der aktuelle Sollwert als Istwert übernommen. |
| Überschreiten der Maximalfrequenz Wird bei der Berechnung der notwendigen Frequenz zum Erreichen der Sollposition im vorgesehenen Zeitraum, die eingestellte Maximalfrequenz überschritten, so wird die Maximalfrequenz übernommen. Dies führt zu "verlängerten" Fahrwegen und sollte entsprechend berücksichtigt und ggfs. geprüft werden. Die maximale Frequenz kann über den Index 0x8010:12 / 0x8020:12 (Base Frequency 1) eingestellt werden. |