DistributedClocks ggf. justieren
Die EL1262-0010 steuert die Eingangs- und Ausgangsoperation (Lesen bzw. Schreiben der PDO) über einen einzigen internen Trigger, den ESC Sync0, sind also nicht zeitlich unabhängig steuerbar. Die ShiftTime-Einstellung (sowohl über den EtherCAT-Master als auch über den Slave-eigenen Dialog) wirkt immer auf die gesamte Klemme (Eingang und Ausgang).
Hinweis für den EtherCAT Master DC-ShiftTime-Dialog:
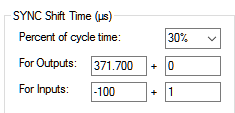 Abb.201: Beispielhafte Werte DC-ShiftTime-Dialog
Abb.201: Beispielhafte Werte DC-ShiftTime-Dialog Die EL1252-0010 ist per ESI als „DC Output Device“ konfiguriert, „For Outputs“ ist ggf. zu nutzen.
Die zeitliche Verschiebung des Ein-/Ausgabevorgangs der EL1262-0010 durch DcShiftTime ist in 2 Fällen von praktischer Bedeutung:
- Die zeitliche Zusammenarbeit „Gleichzeitigkeit“ der EL1262-0010 mit anderen DC-Teilnehmern soll geändert werden (relativ gesehen also früher oder später ausgeben/einlesen)
- es kommt zu Datenübertragungsverlusten (erkennbar z.B. in Sprüngen <> + 1 im CycleCounter) weil sich der Zeitpunkt der Passage des EtherCAT-Frames bei der EL1262-0010 mit der PDO Datenübernahme im ESC überscxhneidet
Aus diesem Grund ist es erforderlich, wie folgt vorzugehen:
1. Die Klemme wird nur mit Eingängen betrieben
- DcShiftTime ändern
- für alle Geräte im EtherCAT-Strang (eher unüblich):
Im EtherCAT Master Dialog gewünschten Wert bei „For Outputs“ eintragen: - - Für die einzelne Klemme:
Abb.201: SYNC shift time ändern„User Defined ShiftTime“ für SYNC0 in [µs] mit (Kommawerte möglich) ändern nach Bedarf -> dies wirkt direkt auf den Lesezeitpunkt, d.h. den Beginn von Sample = und damit den Wert in PDO StartTimeNextLatch-
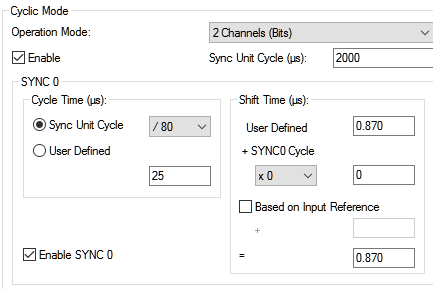 Abb.203: User defined Shift time ändern
Abb.203: User defined Shift time ändern- Sollen externe Verzögerungen kompensiert werden kann auch C0E x80n0:02 „Timestamp correction“ in [ns] beschrieben werden, dann wird der Wert in PDO StartTimeNextLatch in jedem Zyklus mit diesem Eintrag verrechnet (addiert oder abgezogen). Der elektrische Lesezeitpunkt ändert sich dann also nicht, nur der übertragene Zeitstempel wird manipuliert.
2. Die Klemme wird nur mit Ausgängen betrieben
- DcShiftTime ändern
- für alle Geräte im EtherCAT Strang (eher unüblich): siehe bei Eingängen
- Für die einzelne Klemme: siehe bei Eingängen - Eine separate Manipulation des Ausgabezeitpunktes ist nicht möglich
3. Die Klemme wird mit Eingängen und Ausgängen betrieben
Es ist zuerst der Ausgang wie o.a. einzustellen, danach ist der Eingangszeitstempel per „Timestamp correction“ einzustellen.
 | Übertragung des DC-Zeitstempels Die Übertragung des DC-Zeitstempels StartTimeNextLatch/StartTimeNextOuput bietet die Möglichkeit, die Prozessdaten nicht mehr zyklusbasiert, sondern „echt“ zeitbasiert zu verarbeiten. Dies erfordert steuerungsseitig zusätzlichen Code, der im Falle der TwinCAT3 XFC Library bzw. NC/Nockenschaltwerk bereits von Beckhoff erstellt wurde und ansonsten applikationsseitig zu erstellen ist. |