Beschreibung
Bei der Kollisionsüberwachung werden die in der CNC generierten Positions-Sollwerte eines Achspaares in Echtzeit überwacht. Unterschreitet der Abstand der beiden Positionen unter Berücksichtigung des zum Anhalten benötigten Bremswegs den minimal zulässigen Abstand, so werden die Achsen entsprechend den vorgegebenen dynamischen Daten unverzüglich gestoppt und die CNC gibt die Meldung 70092 aus.
Nach dem CNC-RESET müssen die beiden Achsen voneinander weg-positioniert werden.
Zwei Achsen deren gegenseitiger Abstand überwacht wird werden auch als Kollisionspaar bezeichnet.
Es besteht die Möglichkeit mehrere Kollisionspaare zu bilden, ebenso kann auch der Abstand einer Achse zu zwei anderen Achsen überwacht werden.
| |
Bei der Stillsetzung der Achsen aufgrund einer Kollisionserkennung wird im Allgemeinen die programmierte Kontur verlassen. |

Parameter
Zur Kollisionsüberwachung wird jeweils für eine Achse (die Masterachse) im Parameter P-AXIS-00043 die logische Achsnummer der anderen Achse (des Kollisionspartners) angegeben.
Für beide beteiligte Achsen ist im Parameter P-AXIS-00015 (achs_mode) das Bit 0x8000 zu setzen.
Der minimal zulässige Abstand zwischen den Bezugspunkten der Schlitten wird über den Parameter P-AXIS-00045 (coll_offset) der Masterachse angegeben. Falls zwei Achsen gegenseitig, als Kollisionspaar konfiguriert, wurden so wird bei unterschiedlich konfiguriertem Parameter P-AXIS-00043 der größere der beiden Werte verwendet.
Befinden sich die Kollisionsachsen in unterschiedlichen CNC-Kanälen, so kann über den Parameter P-AXIS-00044 (coll_decelerate_chan) ein Anhalten in beiden Kanälen erzwungen werden, wenn eine Kollisionsachse einen Antriebsfehler meldet
 Abb.3: Minimal zulässiger Abstand
Abb.3: Minimal zulässiger AbstandBeispiel
Initialisierung in der Achsparameterliste der Achse 1
kopf.achs_nr 1
achs_mode 0x8001Initialisierung in der Achsparameterliste der Achse 2
kopf.achs_nr 2
achs_mode 0x8001
kenngr.coll_check_ax_nr 1
kenngr.coll_offset 200000Initialisierung in der Achsparameterliste der Achse 3
kopf.achs_nr 3
achs_mode 0x8001
kenngr.coll_check_ax_nr 2
kenngr.coll_offset 300000 | Die Kollisionsüberwachung wird erst aktiv, nachdem für die entsprechen-den Achsen eine Referenzpunktfahrt durchgeführt wurde. |
Bewegungsrichtung der Achsen
Bei der Kollisionsüberwachung wird davon ausgegangen, dass sich die beteiligten Achsen mechanisch gleichsinnig bewegen, d. h. wenn für beide Achsen eine Bewegung in positiver Richtung programmiert wurde bewegen sich die Achsen mechanisch ebenfalls in dieselbe Richtung. Falls diese Voraussetzung nicht erfüllt ist muss dies durch Setzen des Parameters P-AXIS-00262 (coll_moving_dir_inverted) in der Parameterliste der Masterachse angezeigt werden.
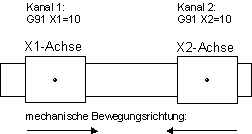 Abb.4: Kollisionspaar mit mechanisch inversen Bewegungsrichtungen
Abb.4: Kollisionspaar mit mechanisch inversen BewegungsrichtungenBeispiel
Initialisierung in der Achsparameterliste der Achse X1
kopf.achs_nr 1
achs_mode 0x8001Initialisierung in der Achsparameterliste der Achse X2
kopf.achs_nr 2
achs_mode 0x8001
kenngr.coll_check_ax_nr 1
kenngr.coll_offset 200000
kenngr.coll_moving_dir_inverted 1Nullpositionen der Achsen
Falls die Kollisionsachsen nicht dieselbe Nullposition haben, ist der Versatz zwischen den beiden Positionen in den Parameter P-AXIS-00263 (coll_zero_position_offset) einzutragen. Der Wert vom P-AXIS-00263 ist dabei gleich der Position des Nullpunktes des Kollisionspartners im Achskoordinatensystem der Masterachse.
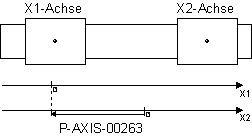 Abb.5: Kollisionspaar mit unterschiedlichen Nullpositionen
Abb.5: Kollisionspaar mit unterschiedlichen NullpositionenBeispiel
In diesem Beispiel sind zwei Kollisionspaare definiert:
- Paar: X1-Achse mit X2-Achse wobei die X2-Achse die Masterachse und X1 die Partnerachse ist.
- Paar: X2-Achse mit X3Achse wobei die X3-Achse die Masterachse und X2 die Partnerachse ist.
Initialisierung in der Achsparameterliste der Achse X1
kopf.achs_nr 1
achs_mode 0x8001Initialisierung in der Achsparameterliste der Achse X2
kopf.achs_nr 2
achs_mode 0x8001
kenngr.coll_check_ax_nr 1
kenngr.coll_offset 200000
kenngr.coll_zero_position_offset -100000Achsverzögerung bei der Kollisionsüberwachung
Standardmäßig wird für die Kollisionsüberwachung der Wert von P-AXIS-00008 (a_max) verwendet, um die Bremswege zu berechnen und die Achsen im Kollisionsfall abzubremsen.
Durch den Parameter P-AXIS-00267 (coll_use_a_emergency) kann diese Verzögerung auf den im Parameter P-AXIS-00003 (a_emergency) definierten Wert umgestellt werden.
Bremswegbetrachtung
Die aktuelle Geschwindigkeit einer Achse ergibt sich zu:
vt = (sollwtn - sollwtn-1) / TA vt aktuelle Geschwindigkeit
TA Interpolations-Zykluszeit
sollw Positions-Sollwerte in Takt n und n-1
Der minimale Bremsweg ergibt sich aus der eingestellten Verzögerung für die Kollisionsüberwachung (Parameter P-AXIS-00008 (a_max), P-AXIS-00267 (coll_use_a_emergency), P-AXIS-00003 (a_emergency)) und der aktuellen Geschwindigkeit zu:
sbrems = ½ (vt2/acoll)
Mit:
sbrems : Bremsweg
vt : aktuelle Geschwindigkeit
acoll : Verzögerung für Kollisionsüberwachung
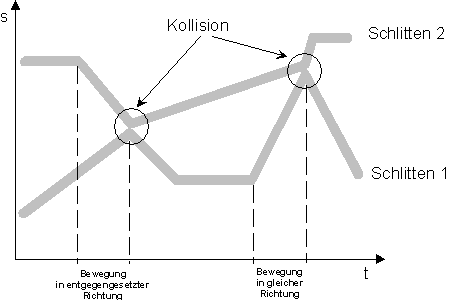 Abb.6: Mögliche Kollisionsszenarien
Abb.6: Mögliche Kollisionsszenarien