FB_MTP_MonBinDrv
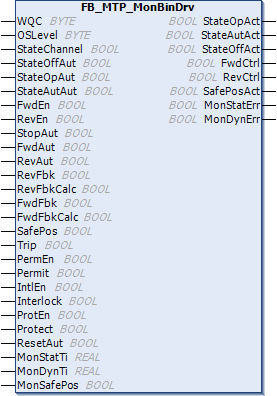
The function block FB_MTP_MonBinDrv is an object for controlling a binary drive from different sources: internal PLC logic or manual operation (e. g. via OPC UA). Switching requests are managed via the state machine of Operation Mode. It also includes the option of monitoring the output values with the respective feedback signals. The OPC UA access rights are described in the variable tables.
Controlling the drive
The direction of rotation of the drive is specified via the switching requests Fwd*, Rev* and Stop*. The state machine of the Operation Mode manages whether and from which source new switching requests are processed. With simultaneous requests from Fwd* and Rev*, both are prioritized equally and the drive remains in its state. Stop* is prioritized highest at SafePos = FALSE with simultaneous requests from Fwd*, Rev* and Stop*. If SafePos = TRUE, the switching requests Fwd*, Rev* and Stop* are prioritized equally and the drive remains in its current state in the event of simultaneous requests.
When Locking is active, it is no longer possible to control the drive, depending on the type of interlock.
Safety position
The safety position is defined via the variables SafePos, SafePosDirEn and SafePosDir.
The variable SafePos is used to specify whether the safety position of the drive is the de-energized state or an active state.
 | The variables |
Safety position: de-energized state
In the de-energized state, the safety position of the drive is: FwdCtrl = FALSE and RevCtrl = FALSE.
Safety position: active state
For the active state, the default direction of rotation can be enabled (SafePosDirEn = TRUE) and the direction of rotation can be specified (SafePosDir).
If the specification of the direction of rotation is disabled SafePosDirEn = FALSE, the current movement state (forward, reverse or stop) is the safety position.
If the default setting is enabled, the safety position SafePosDirEn = TRUE forward (SafePosDir = FALSE) or reverse (SafePosDir = TRUE).
Monitoring
The control and the respective Feedback can be monitored via Feedback monitoring.
Further characteristics
Inheritance hierarchy
FB_MTP_BinDrv
FB_MTP_MonBinDrv
 Inputs
Inputs
Name | Type | Description | OPC UA access |
|---|---|---|---|
TagName | STRING | Name of the interface | - |
TagDescription | STRING | Description of the interface | - |
WQC | BYTE | Worst Quality Code | Read |
OSLevel | BYTE | Level must be defined for system. Value 0 is reserved for local operation. | Read/write |
State* |
| See Operation Mode |
|
FwdEn | BOOL | Enable forward movement: 1: Enabled 0: Disabled | Read |
RevEn | BOOL | Enable reverse movement: 1: Enabled 0: Disabled | Read |
StopAut | BOOL |
(Relevant if 1: Execute stop. 0: No stop | Read |
FwdAut | BOOL |
(Relevant if 1: Execute forward movement. 0: Do not execute any forward movement. | Read |
RevAut | BOOL |
(Relevant if 1: Execute reverse movement. 0: Do not execute any reverse movement. | Read |
FwdFbkCaIc | BOOL | Source of the feedback signal Forward movement: 1: Calculated 0: Sensor | Read |
FwdFbk | BOOL | Feedback signal Forward movement: 1: Forward movement 0: No forward movement | Read |
RevFbkCaIc | BOOL | Source of the feedback signal Reverse movement: 1: Calculated 0: Sensor | Read |
RevFbk | BOOL | Feedback signal Reverse movement: 1: Reverse movement 0: No reverse movement | Read |
Perm* Int* Prot* |
| See Locking |
|
Trip | BOOL | Signaling contact for motor protection: 1: No error 0: Motor protection tripped. | Read |
SafePos | BOOL | 1: Retain current state. 0: Stop | Read |
SafePosDirEn | BOOL | 1: Rotation direction specification for 0: No rotation direction specified | – |
SafePosDir | BOOL | Rotation direction specification for 1: reverse 0: forward | – |
MonStatTi | REAL | Monitoring time for static errors [s] | Read |
MonDynTi | REAL | Monitoring time for dynamic errors [s] | Read |
MonSafePos | BOOL | Behavior of the interface after an error occurs: 1: Safe position should be approached. 0: The current state is retained. | Read |
ResetAut | BOOL |
1: Reset requested. 0: No reset requested. | Read |
 Outputs
Outputs
Name | Type | Description | OPC UA access |
|---|---|---|---|
State* |
| See Operation Mode |
|
FwdCtrl | BOOL | Forward movement: 1: active 0: inactive | Read |
RevCtrl | BOOL | Reverse movement: 1: active 0: inactive | Read |
SafePosAct | BOOL | Safety position enabled: 1: Safety position is active. 0: Safety position is not active. | Read |
MonStatErr | REAL | Static error: 1: active 0: inactive | Read |
MonDynErr | REAL | Dynamic error: 1: active 0: inactive | Read |
External variables
Name | Type | Description | OPC UA access |
|---|---|---|---|
State* |
| See Operation Mode |
|
StopOp | BOOL |
(Relevant if 1: Execute stop. 0: Do not execute a stop. | Read/write |
FwdOp | BOOL |
(Relevant if 1: Execute forward movement. 0: Do not execute any forward movement. | Read/write |
RevOp | BOOL |
(Relevant if 1: Execute reverse movement. 0: Do not execute any reverse movement. | Read/write |
MonEn | BOOL | Enable 1: 0: | Read/write |
ResetOp | BOOL |
0→1: 1→0: Request has been processed. | Read/write |
 Methods
Methods
Name | Description |
|---|---|
SetOffline SetOperator SetAutomatic | See Operation Mode |