Command
Several control or positioning commands of an object to be commanded have an influence on the output value PresentValue. All commands are stored in an array. The command with the highest priority determines the result at the output of the object.
A priority can be given a value between 1 and 16. The highest priority has the value 1.
The following objects in TwinCAT 3 Building Automation are objects to be commanded and thus have a priority array.
|
FB |
Type |
Description |
|---|---|---|
|
FB_BA_BO_Raw |
BO |
Binary output with external declaration of variables for hardware mapping. |
|
FB_BA_BO |
BO |
Binary. |
|
FB_BA_BO_IO |
BO |
Binary output with internal declaration of variables for hardware mapping. |
|
FB_BA_AO_Raw |
AO |
Analog output with external declaration of variables for hardware mapping. |
|
FB_BA_AO |
AO |
Analog. |
|
FB_BA_AO_IO |
AO |
Analog output with internal declaration of variables for hardware mapping. |
|
FB_BA_MO_Raw |
MO |
Multi State output with external declaration of the variables for hardware mapping. |
|
FB_BA_MO |
MO |
Multi State output. |
|
FB_BA_MO_IO |
MO |
Multi State output with internal declaration of variables for hardware mapping. |
|
FB_BA_BV |
BV |
Binary Value object. |
|
FB_BA_MV |
MV |
Multistate Value object. |
|
FB_BA_AV |
AV |
Analog Value object. |
For an entry to be made in the priority array of an object, the associated enable input bEn... must be TRUE on the function block.
The Manual Remote priority is not activated by means of an input at the function block, but by writing to a parameter variable. The object is commanded either via the BACnet protocol, e.g. from an MBE, or from TwinCAT via ADS.
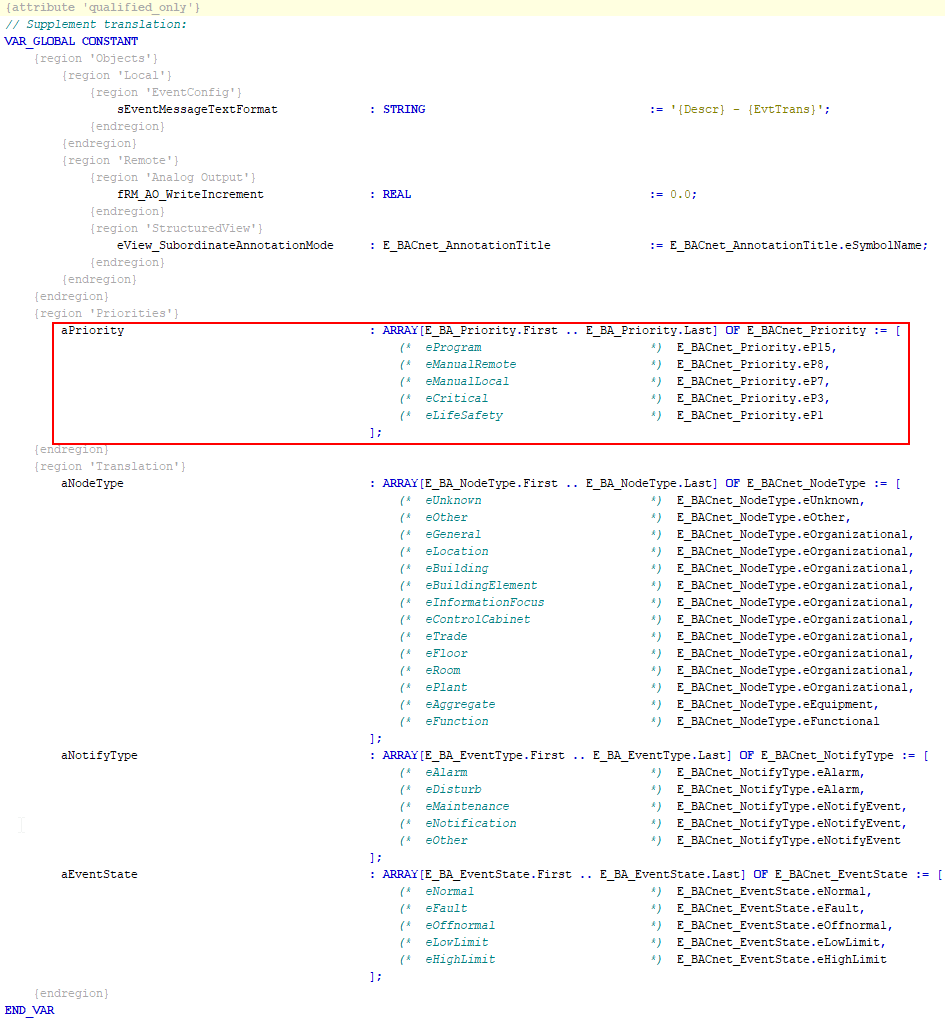
The following priorities are predefined at the objects by TwinCAT Building Automation:
|
Name |
Description |
Symbol release |
Symbol value |
Default Prio |
|---|---|---|---|---|
|
Safety |
Personal safety |
bEnSafety |
*ValSfty |
1 |
|
Critical |
Plant safety |
bEnCrit |
*ValCritical |
3 |
|
ManLoc |
Local manual override (LVB) |
bEnManLoc |
*ValManLoc |
7 |
|
ManualRm |
Manual override from a distance (MBE) |
bEnManualRm |
*ValManualRm |
8 |
|
Pgm |
Program control |
bEnPgm |
*ValPgm |
15 |
Depending on whether the object type is Analog, Binary or Multi State, the value of a command is a REAL, BOOL or UDINT.
Changing priorities
The priorities can be changed in the variable list BA_BACnet_Param.
The active priority is displayed at the output of all objects to be commanded by means of the variable eActivePrio.
Variables
Name | Type | Description |
|---|---|---|
bEnSafety | BOOL | Enabling the "Safety" priority. |
fValSafety | REAL | Analog value for the "Safety" priority. |
bValSafety | BOOL | Binary value for the "Safety" priority. |
nValSafety | INT | Integer value for the "Safety" priority. |
bEnCritical | BOOL | Enabling the "Critical" priority. |
fValCritical | REAL | Analog value for the "Critical" priority. |
bValCritical | BOOL | Binary value for the "Critical" priority. |
nManCritical | INT | Integer value for the "Critical" priority. |
bEnManLocal | BOOL | Enabling the "Manual Local" priority. |
fValManLocal | REAL | Analog value for the "Manual Local" priority. |
bValManLocal | BOOL | Binary value for the "Manual Local" priority. |
nManLocal | INT | Integer value for the "Manual Local" priority. |
bEnManualRm | BOOL | Enabling the "Manual Remote" priority. |
fValManualRm | REAL | Analog value for the "Manual Remote" priority. |
bValManualRm | BOOL | Binary value for the "Manual Remote" priority. |
nManualRm | INT | Integer value for the "Manual Remote" priority. |
bEnPgm | BOOL | Enabling the "Program" priority. |
fValPgm | REAL | Analog value for the "Program" priority. |
bValPgm | BOOL | Binary value for the "Program" priority. |
nPgm | INT | Integer value for the "Program" priority. |