System configuration
The system configuration depends on the target system and is described in detail in chapter System configuration.
Increase router memory
TwinCAT Vision requires dynamic memory allocation when creating an image, for example. This takes place in the router memory. Accordingly, the router memory must be configured with adequate size.
This is done in the TwinCAT project under SYSTEM > Real-Time > Settings > Router Memory (Mbyte).
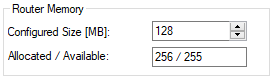
The configuration must then be activated  . If the router memory is reduced, it is necessary to restart the target system.
. If the router memory is reduced, it is necessary to restart the target system.
Selection of a CPU core and a task
In multi-core systems, TwinCAT enables a distinction between Windows cores and isolated cores. With Windows cores, the operating system and the TwinCAT application share the processor time. The real-time portion can be limited to between 10% and 90%. In contrast, isolated cores are fully available to the TwinCAT application. For this reason, the use of isolated cores is recommended for Vision applications. Divided cores can also be used without problems for the initial testing.
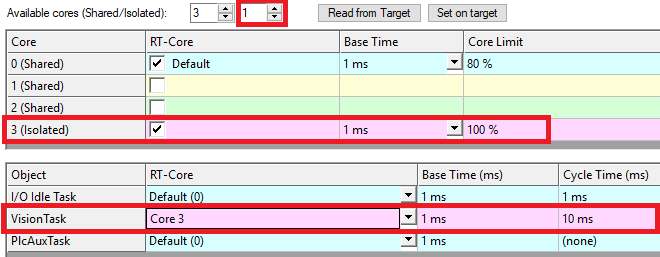
The core configuration is carried out in the TwinCAT project tree under SYSTEM > Real-Time > Settings. Detailed configuration instructions can be found in the chapter CPU cores and tasks. This chapter also describes how to change the cycle time of the executing task.
The configuration must then be activated . In addition, the target system must be restarted when redefining divided and isolated cores.
Installing a real-time Ethernet driver
To connect GigE Vision cameras to TwinCAT Vision, the TwinCAT RT Ethernet driver must be installed on the network adapters used. The driver ensures that TwinCAT can use the network adapter during runtime. Details can be found in chapter Network adapter.
In the development environment, an installation assistant can be called up via TWINCAT > Show Realtime Ethernet Compatible Devices... On the target system the assistant can be started via the file C:\TwinCAT\3.1\System\TcRteInstall.exe. The RT Ethernet driver can be installed for the network adapters listed under Compatible devices in the dialog that opens.
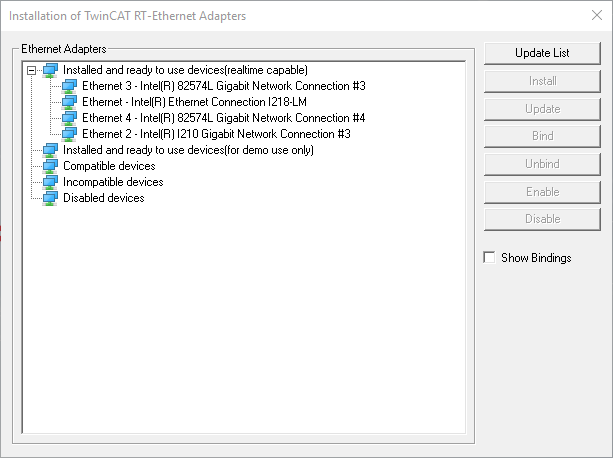
Make sure that all network adapters you want to connect a camera are now in the list of Installed and ready to use devices (realtime capable).