Overview
As a real-time software environment, TwinCAT offers the option of synchronization with an externally specified time, based on cycle/frequency or absolute time. Time access usually takes place via the EtherCAT fieldbus and the integrated distributed clocks functionality. The external time can be transferred to the TwinCAT system in different ways:
Method | Required devices |
|---|---|
IEEE 1588, PTP | EL6688 EtherCAT Terminal |
EtherCAT <-> EtherCAT | EL6692, EL6695 EtherCAT Terminal |
Any clock pulse as electrical signal | EL1252 EtherCAT Terminal (as described in this document) |
Other methods: See Beckhoff Information System | |
The TwinCAT 3 EtherCAT External Sync function extends the TwinCAT EtherCAT master with the option of synchronizing the Beckhoff real-time with an external digital electrical clock signal and provides a library with various function blocks for this purpose. The signal must be connected to an EL1252 EtherCAT Terminal, which means that the EtherCAT fieldbus has to be used.
 | EtherCAT System Documentation For further information on external synchronization see the Beckhoff Information System, section Fieldbus Components > EtherCAT Terminals > EtherCAT System Documentation |
Application examples
- An existing system is to be expanded with an additional Beckhoff TwinCAT controller, which should be synchronized with the main controller. At the main controller, the clock signal that is picked up by the TwinCAT controller via the EL1252 can be generated by a toggling 24 V digital output, for example. (See Examples > EtherCAT External Sync)
- A TwinCAT system should generally run synchronously with an external cycle, e.g. a second pulse (PPS, pulses per second) or local time
- A TwinCAT system is to be supplied with the absolute time, in addition to the clock pulse. If an absolute time is also modulated onto an external PPS signal, e.g. via DCF77 coding, the TF6225 can be used in conjunction with a PLC function block to decode the DCF77 signal. The function blocks for coding/decoding DCF77 are included in the sample program. Other time codings can be implemented in the PLC itself. (See Examples > DCF77)
Application example: external synchronization of a system environment (B) from a non-modifiable system environment (A)
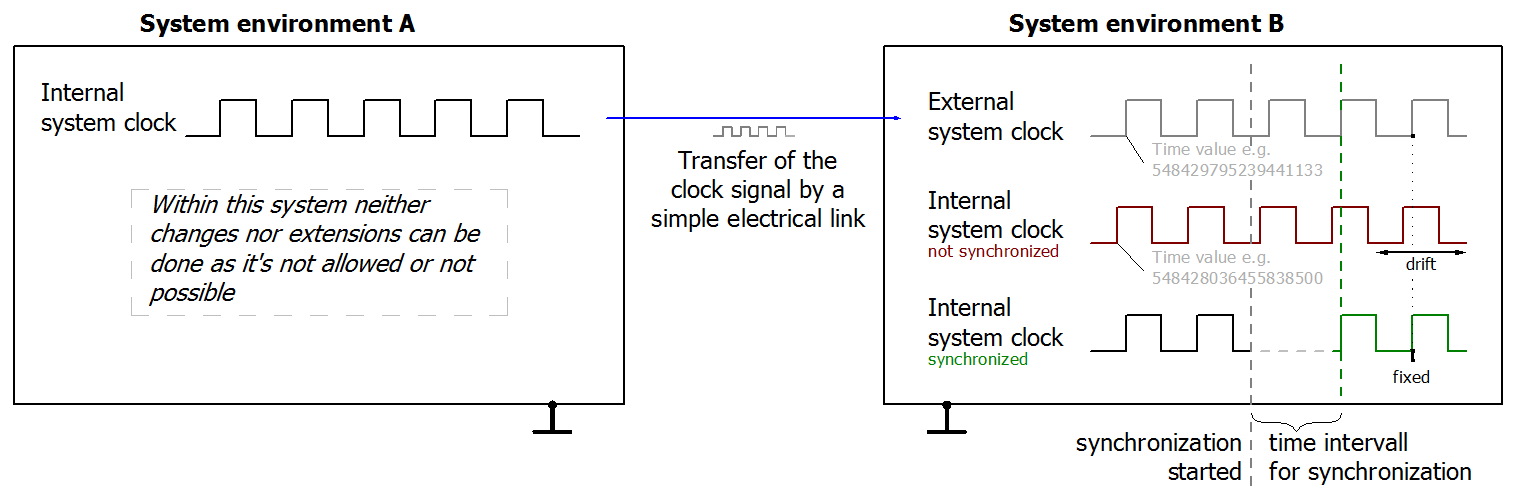
| In the following sections, system environment (A) is regarded as the master system (from any manufacturer), system environment (B) is regarded as the slave system (TwinCAT only). |