MC_AxCtrlAutoZero_BkPlcMc

 | Available from version 3.0 |
The function block executes an automatic zero compensation. This function block may only be used for zero overlap valves.
 Inputs
Inputs
VAR_INPUT
Enable: BOOL:=FALSE;
EnableOnMoving: BOOL:=FALSE;
OffsetLimit: LREAL:=0.0;
Tn: LREAL:=0.0;
Threshold: LREAL:=0.1;
Filter: LREAL:=0.1;
END_VARName | Type | Description |
|---|---|---|
Enable | BOOL | This input controls the activity of the compensation. |
EnableOnMoving | BOOL | This input controls the activity of the compensation. |
OffsetLimit | LREAL | [V] The value in fZeroCompensation is limited to this value. |
Tn | LREAL | [s] The integral action time of the compensation. This is the time for a change by 10 V. Values greater than 100 s are recommended. |
Threshold | LREAL | [V] Parameter for the Done signal. |
Filter | LREAL | [s] Parameter for the Done signal. |
 Inputs/outputs
Inputs/outputs
VAR_IN_OUT
Axis: AXIS_REF_BkPlcMc;
END_VARName | Type | Description |
|---|---|---|
Axis | AXIS_REF_BkPlcMc | Here, the address of a variable of type AXIS_REF_BkPlcMc should be transferred. |
 Outputs
Outputs
VAR_OUTPUT
Error: BOOL;
ErrorID: UDINT;
Active: BOOL;
Limiting: BOOL;
Done: BOOL;
END_VARName | Type | Description |
|---|---|---|
Error | BOOL | The occurrence of an error is indicated here. |
ErrorID | UDINT | An encoded indication of the cause of the error is provided here. |
Active | BOOL | Indicates that the function block actively adjusts the value of fZeroCompensation in ST_TcHydAxParam. |
Limiting | BOOL | Indicates that the value of fZeroCompensation in ST_TcHydAxParam has reached the limit specified by OffsetLimit. |
Done | BOOL | Indicates leveling out of the offset compensation. |
Purpose of the function block
If a hydraulic cylinder is drifting when the position controller is switched off (kP=0.0), or if there is a permanent lag error relative to the target when the position controller is active, this can be corrected by using a zero overlap valve with offset compensation.
A hydraulic cylinder stops when it is in equilibrium of forces. In the simplest case (cylinder with identical surfaces, no external forces by gravity or a process) this equilibrium is fulfilled, if the same pressure acts on both surfaces. For a differential cylinder, the pressures must be proportional to the inverse of the surfaces. Any external forces must be included. In order to achieve the required pressure conditions, a proportion of the system pressure is required as pressure difference. In the case of a zero overlap valve, this is defined by the pressure gain characteristic.
Another possible reason for an offset is a difference between the hydraulic zero point of the valve and the logical zero point of the output hardware. These are unavoidable manufacturing tolerances.
Therefore, a small valve excitation with up to ±0.5 V is required. Refer to the data sheets provided by the valve and hardware manufacturers for further information.
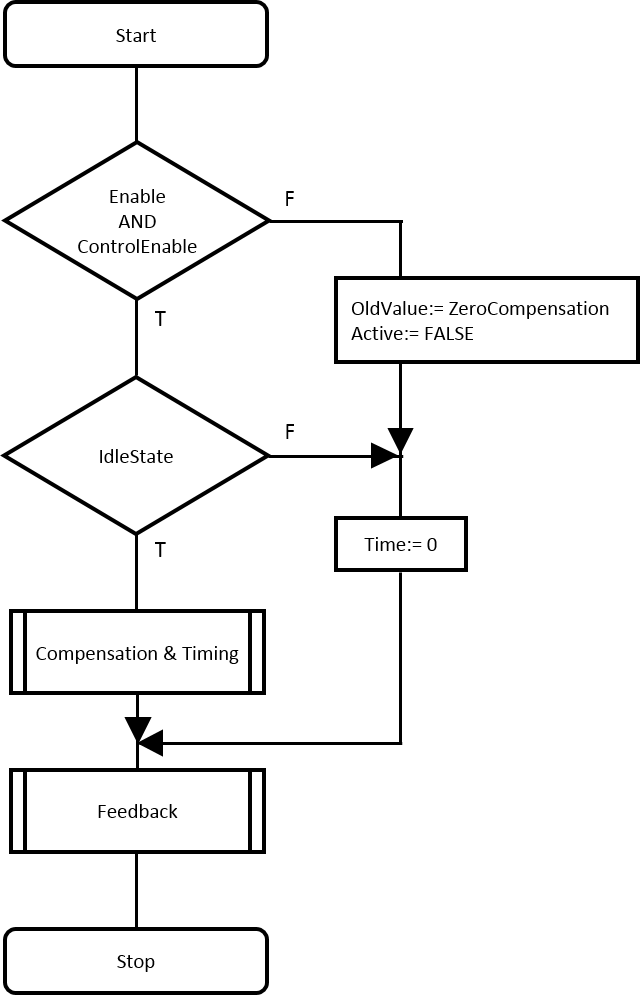
Behavior of the function block: Enable logic
As long as Enable for the function block or the axis controller is FALSE, the function block does not become Active. The comparison value for monitoring the compensation is initialized and the time measurement for the Done message is reset.
If the enable conditions are met and the axis is not in idle state (i.e. it is in motion), the time measurement for the Done message is also reset.
If the enable conditions are met and the axis is in idle state, the function block 'Compensation&Timing' is processed.
Irrespective of these preconditions, the function block' Feedback' is processed.
Enable logic:
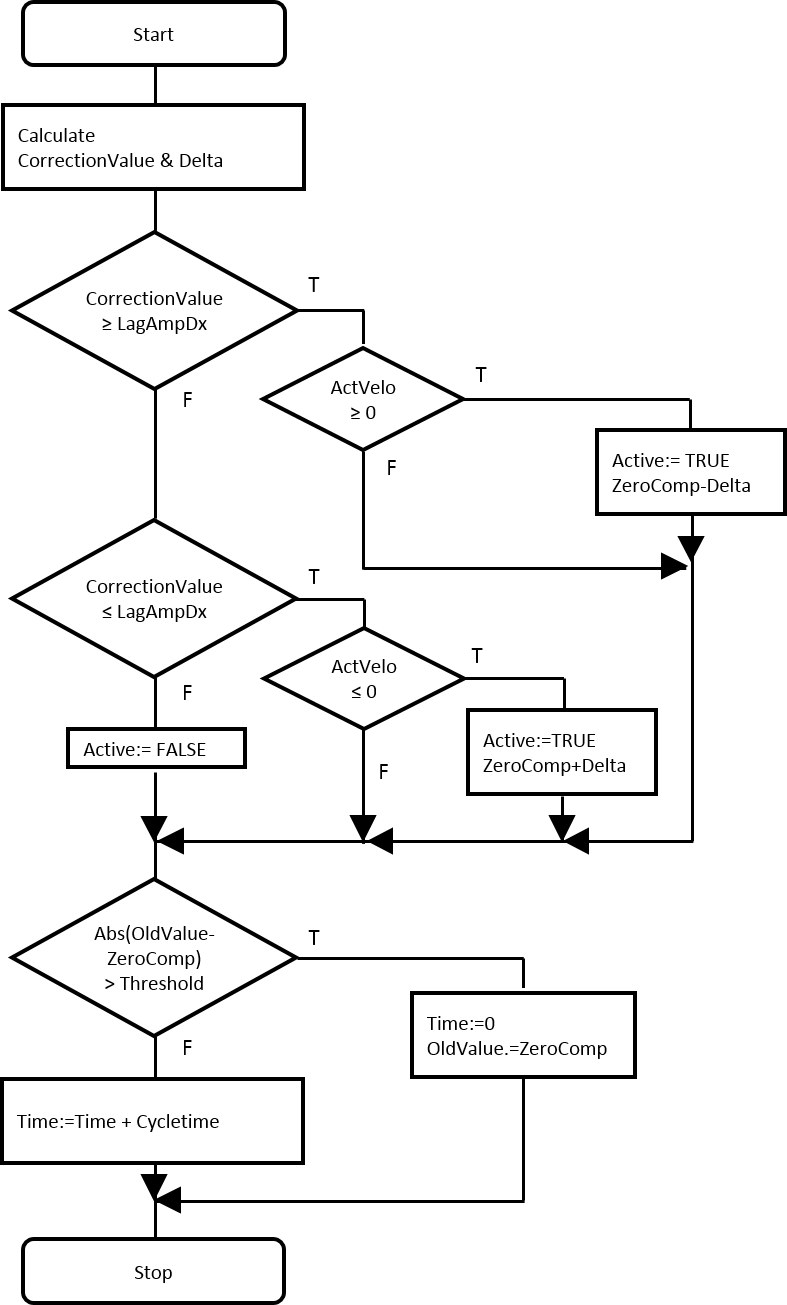
Behavior of the function block: Compensation&Timing
A correction value is formed from the lag error and the response of the controller. The bandwidth of the possible axis controller parameterization is taken into account. A delta value (maximum change in zero compensation per cycle) is formed from this correction value and Tn. Tn defines a ramp time for an increase by 10 V. The delta value is limited such that this ramp slope is not exceeded. In this way an excessively fast change, during which the correction would become unstable, can be avoided. Values greater than 100 seconds are recommended.
A tolerance threshold is used for compensation. In this case LagAmpDx (threshold value of the I component in the position controller) is used.
If the correction value is greater than or equal to the tolerance threshold and the actual velocity is greater than or equal to zero (i.e. the remaining correction value is not already reduced), the Active function block is used and the compensation is reduced in each cycle by the delta value described.
If the correction value is less than or equal to the tolerance threshold and the actual velocity is less than or equal to zero (i.e. the remaining correction value is not already reduced), the Active function block is used and the compensation is reduced in each cycle by the delta value described.
If the magnitude of the correction value is smaller than the tolerance threshold, Active becomes FALSE.
If the compensation differs by more than the Threshold from the OldValue comparison value, the time measurement is reset and the current compensation is updated as a new comparison value. Otherwise, the time measurement is increased with the cycle time. In this way, the time required to accumulate a change in compensation by at least the Threshold is logged.
Compensation&Timing:
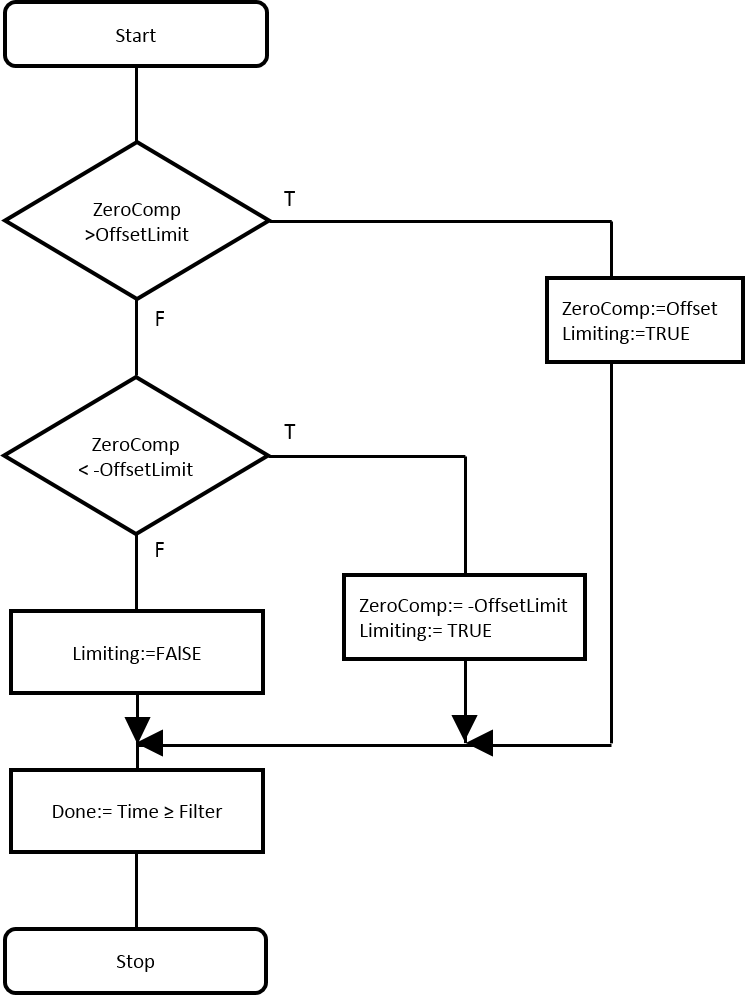
Behavior of the function block: Feedback
The compensation is limited to ±OffsetLimit and signaled to Limiting.
Done is reported when the function block is active and the time measurement reaches the time set in Filter. Example: If Threshold is set to 0.05 and Filter to 2.0, Done is reported if the compensation has been readjusted by less than 0.05 V within the last 2 seconds.
Feedback
| The limitation to the range specified by OffsetLimit applies even if the function block is not active. The Limiting output is updated. |
The value OffsetLimit and ST_TcHydAxParam.fZeroCompensation are regarded as offset voltage. The value 10.0 therefore corresponds to full scale control. In general, a value between 0.1 and 1.0 makes sense for OffsetLimit, depending on the application.
Integration of the function block in the application
In the call sequence for the function blocks of an axis, an MC_AxCtrlAutoZero_BkPlcMc function block should appear immediately before the MC_AxRtFinish_BkPlcMc. If an MC_AxStandardBody_BkPlcMc function block is called instead of the individual function blocks, MC_AxCtrlAutoZero_BkPlcMc should be called before this function block.
| |
Dangerous axis movement If situations occur during axis operation, in which the axis has a controller enable pending but does not display its normal motion behavior, the MC_AxCtrlAutoZero_BkPlcMc function block must be disabled. Possible causes for such a situation including function block startup with or without transition to pressure control or reduction of or switch-off of the supply. If this is not taken into account, the value of fZeroCompensation in ST_TcHydAxParam may run in any direction until the specified limit is reached. As soon as the axis is responsive again at a later stage, a dangerous motion may be unavoidable. In this case the positioning behavior will be severely affected. If the function block is called without EnableOnMoving, it may no longer be able to automatically correct the shifted offset. In this case the axis will stop outside the target window and never report the motion as complete, or only after a long time. |

In combination with an MC_AxStandardBody_BkPlcMc function block, all responses of the MC_AxCtrlAutoZero_BkPlcMc function block are delayed by one PLC cycle. Usually this is no problem. If this offset does cause problems, the individual function blocks for encoder etc. should be used, and the MC_AxCtrlAutoZero_BkPlcMc function block should be called immediately before the MC_AxRtFinish_BkPlcMc function block.