Jerk limiting slope
The slope function determines the velocity on the programmed path and maintains the specified permissible velocities, accelerations and jerks [2]-1. The following modes are available :
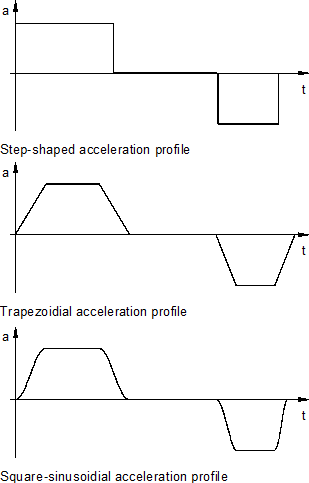
- Step-shaped acceleration profile with restriction of acceleration without monitoring the jerk
- Trapezoidal acceleration profile with jerk monitoring
- Square-sinusoidal acceleration profile with jerk monitoring
The acceleration curve is generated depending on the slope function selected:
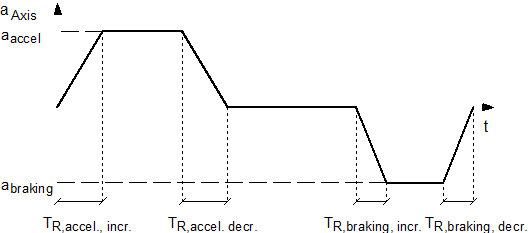
The acceleration profile is parameterised axis-specific by accelerations and ramp times [2]-1: