Selecting operating mode (#SLOPE, #SLOPE DEFAULT)
 | As of Build V2.11.2010.02 the command #SLOPE [...] replaces the command #SET SLOPE PROFIL [...]. For compatibility reasons, this command is still available but it recommended not to use it in new NC programs. |
Syntax: |
#SLOPE [ TYPE=<ident> [ NO_OPT=.. ] ] |
TYPE<ident> | Type of acceleration profile. Permitted identifiers: STEP: Step-shaped acceleration profile, (default, linear profile) TRAPEZ: Trapezoidal acceleration profile SIN2: Square-sinusoidal acceleration profile HSC: HSC slope, recommended for "Extended HSC programming" * |
NO_OPT=.. | Switch the optimised use of jerk: 0: Optimised use of jerk is active. This reduces processing time but requires greater computing resources. It must be checked whether the existing hardware is adequate. 1: Optimised use of jerk is not active (default). |
| * The use of this feature for selecting the HSC slope profile type requires a licence for the "HSC” extension package. It is not included in the scope of the standard license. |
| The specific weighting adaptation of ramp time (G132/G133) and acceleration (G130/G131) is no longer supported by the command #SLOPE [...]. Weightings always act on all ramp times and accelerations (default). |
Syntax: |
#SLOPE DEFAULT |
The programming of #SLOPE DEFAULT restores the initial state (as after start-up). This means that the slope type is set from the channel parameter set P-CHAN-00071.
The initial state is produced at every program start and for every manual block.
Programming Example
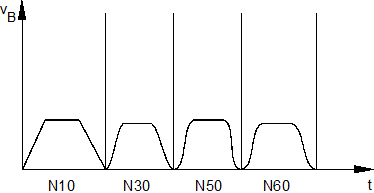
Select the operation mode
The following velocity curve results on the programmed path: