Explicit feed programming for MicroJoints (#CHANNEL SET)
Feed at / behind a MicroJoint
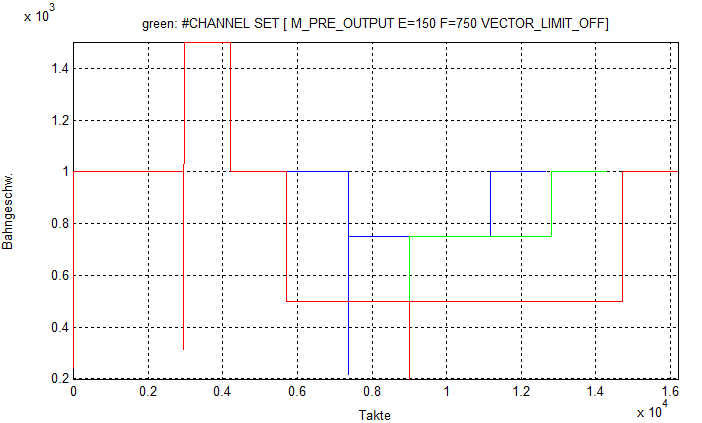
For technical process reasons, it may be necessary to limit the path velocity for a MicroJoint (in particular with an M function MOS which requires no acknowledgement). In addition, the path after the advanced M function (MicroJoint path) is completely traversed to the end at a change in velocity.
This can be defined by the following feed settings in the NC command #CHANNEL SET (see figure below “Feed definition with MicroJoints”).
#CHANNEL SET [ M_PRE_OUTPUT [ E=.. ] [ F=.. ] [ VECTOR_LIMIT_OFF ] ] |
| |
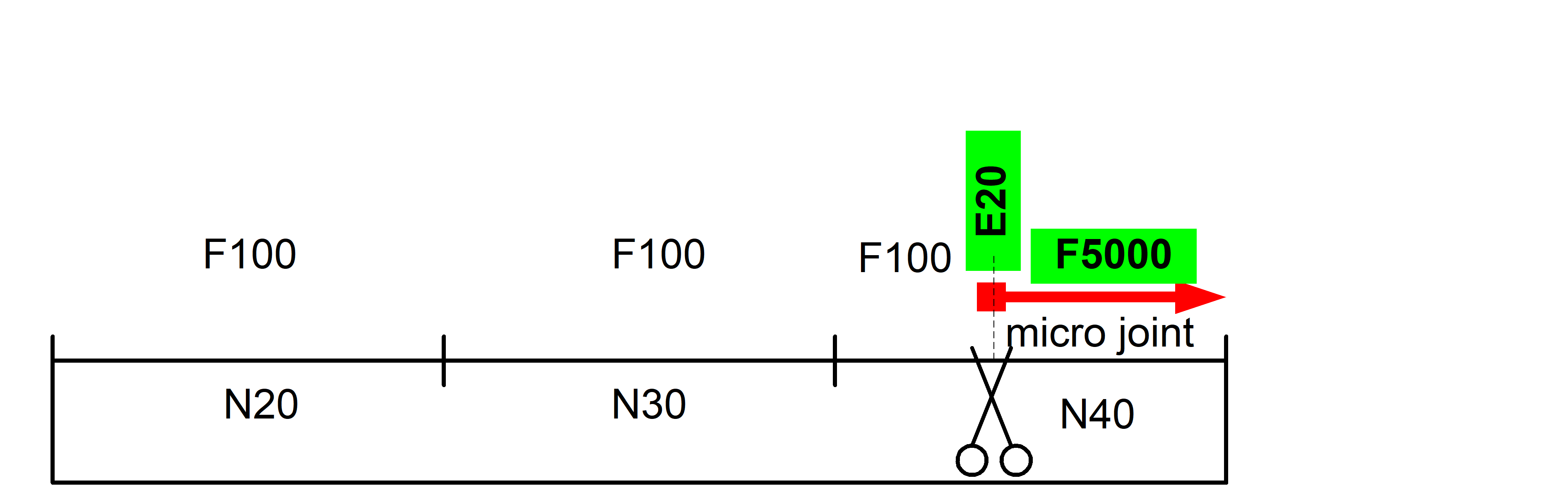
E=.. | Block end velocity E of the previous microjoint (start of microjoint) | |
F=.. | Feed velocity within the microjoint (path between the position of the advanced M function and the originally programmed position of the M function) | |
VECTOR_LIMIT_OFF | Deselecting a possible dynamic limitation. If one of the previously programmed dynamic influences is active via #VECTOR LIMIT (VEL, ACC, DEC), it is suppressed within the microjoint range. | |
Programming Example
Explicit feed programming for MicroJoints
 | If the F or E word is not specified, the feed for the advanced M function and subsequent motion blocks is not changed. |
MicroJoint feed across multiple blocks
When the pre-output of the M function is advanced across multiple blocks, the feed of all MicroJoint motion blocks is also changed to the specified value.
A possibly explicitly programmed feed is replaced by the specific MicroJoint feed.
Programming Example
MicroJoint feed across multiple blocks
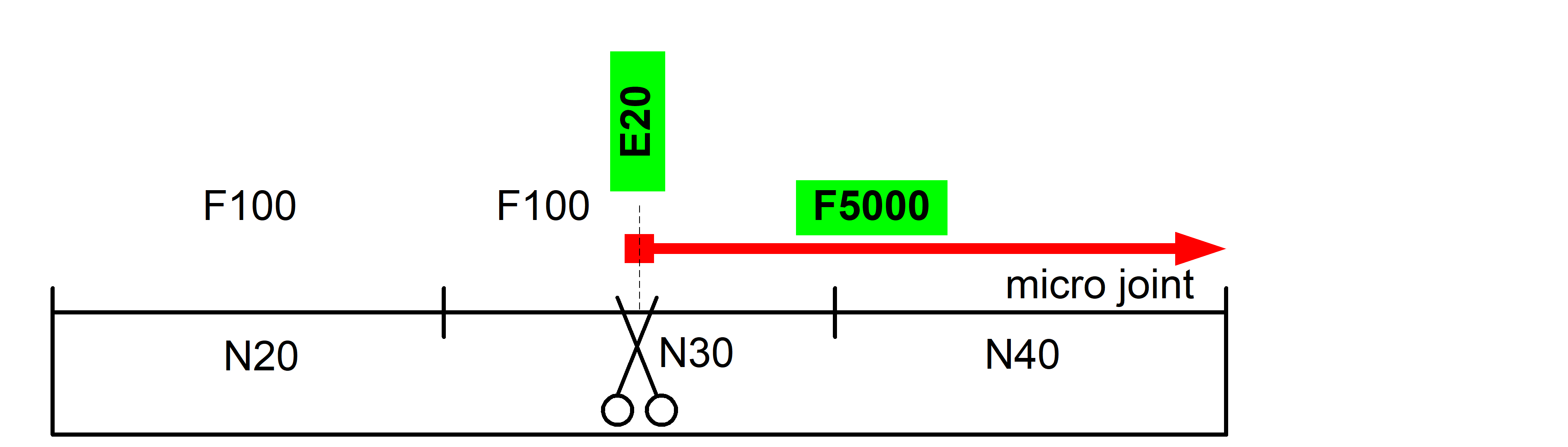
| Specifying a MicroJoint specific feed replaces the possible explicitly programmed feed of the NC block. See example above: F7500 in N40 is replaced by F5000. |
Programming Example
Increased feed with M11, decreased feed with M12
Programming Example
Suppress VECTOR_LIMIT during MicroJoint