HL access with CNC Version < V2.11.28xx
Block search active | |
Description | The interpolator works in block search mode. |
Signal flow | CNC → PLC |
ST path | pMC[channel_idx]^.addr^.StateBahn_Data.X_BlockSearchActive |
Data type | BOOL |
Value range | [TRUE = active - Interpolator works in block search mode., FALSE] |
Access | PLC is reading |
Block search, state | ||
Description | Indicates the current state of the block search mode in the interpolator. | |
Signal flow | CNC → PLC | |
ST path | pMC[channel_idx]^.addr^.StateBahn_Data.W_BlockSearchState | |
Data type | INT | |
Value range | Constant | Value |
HLI_BS_INACTIVE | 0 | |
HLI_BS_WAIT_FOR_PLC_ON | 1 | |
HLI_BS_ACTIVE | 2 | |
HLI_BS_WAIT_FOR_PLC_OFF | 3 | |
HLI_BS_WAIT_RETURN_TO_CONTOUR | 4 | |
HLI_BS_RETURNING_TO_CONTOUR | 5 | |
HLI_BS_WAIT_FOR_CONTINUE_CONTOUR | 6
| |
Access | PLC is reading | |
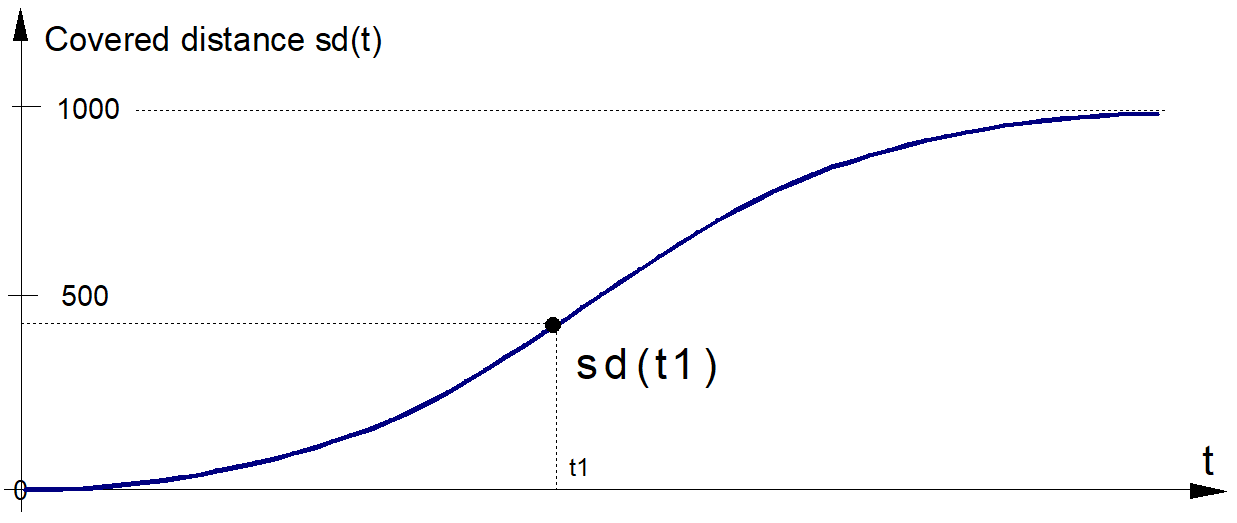
Covered block motion path | |
Description | Part of the path motion traversed in the current block in relation to the total path. This status datum contains the current block position referred to the path distance in space in the motion block in per mil sd(t).
|
Signal flow | CNC → PLC |
Unit | 0.1 % |
ST path | pMC[channel_idx]^.addr^.StateBahn_Data.D_CoveredDistance |
Data type | DINT |
Access | PLC is reading |
Special features | If a main axis participates in the motion, the covered path motion is in relation to the block path of the first three axes. If no main axis participates in the motion, the covered path motion is the position lag with the longest motion time in relation to the block path. |
Currently covered path in the NC program (PCS) | |
Description | Reads the currently covered path in the NC program since program start or since the last #DISTANCE PROG START CLEAR NC command. The calculation is based on the current position in the current NC block. |
Signal flow | CNC → PLC |
Unit | 0.1 µm |
ST path | pMC[channel_idx]^.addr^.StateBahn_Data.D_DistProgStartHigh pMC[channel_idx]^.addr^.StateBahn_Data.D_DistProgStartLow |
Data type | UDINT |
Access | PLC is reading |
Special features | In the NC this is an integer number which occupies 8 bytes in the memory. At the HLI the number is provided in the form of two 4-byte wide values. The value in D_DistProgStartLow contains the 4 lower bytes 0 to 3 and the value in D_DistProgStartHigh contains the higher bytes 4 to 7 of the 8-byte value present in the NC kernel. The read value can be used to command the block search to define the covered path in the NC program from where actual machining should effectively start. |
Line counter, NC program | |
Description | The datum indicates the NC program line which is the source of the command just processed by the interpolator. The value is derived from the number of NC program lines which the decoder has read since the NC program started. All the lines read the decoder are counted, i.e. repeatedly read lines, empty and comment lines. All commands to the interpolator resulting from decoding a NC program line are assigned to the associated line counter. |
Signal flow | CNC → PLC |
ST path | pMC[channel_idx]^.addr^.StateBahn_Data.D_BlockCount |
Data type | UDINT |
Access | PLC is reading |
Block search, distance from continuation position | |
Description | If a NC program is started with block search mode, the NC program is processed in simulative mode (with no path motion) up to the specified continuation position. Block search is then in the HLI_BS_WAIT_FOR_PLC_OFF state and calculates the distance between the actual positions of the axis and the continuation position. If block search is in the HLI_BS_RETURNING_TO_CONTOUR state, this value is refreshed cyclically. |
Signal flow | CNC → PLC |
ST path | pMC[channel_idx]^.addr^.StateBahn_Data.D_BlockSearchPathDeviation |
Unit | 0.1 µm |
Data type | UDINT |
Value range | [0, MAX_SGN32] |
Access | PLC is reading |
Stop condition | |
Description | Displays the condition why the current motion was stopped. |
Signal flow | CNC → PLC |
ST path | pMC[channel_idx]^.addr^.StateBahn_Data.D_StopConditions |
Data type | DINT |
Value range | See table: Value range of stop conditions |
Access | PLC is reading |