trafo.command_pos.param[3] 0 (solution range for motor angle)
trafo.command_pos.param[3] 0 (movement direction of linear axis)
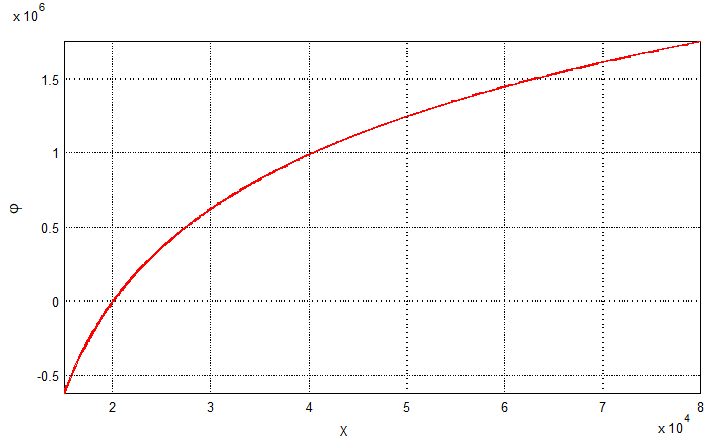
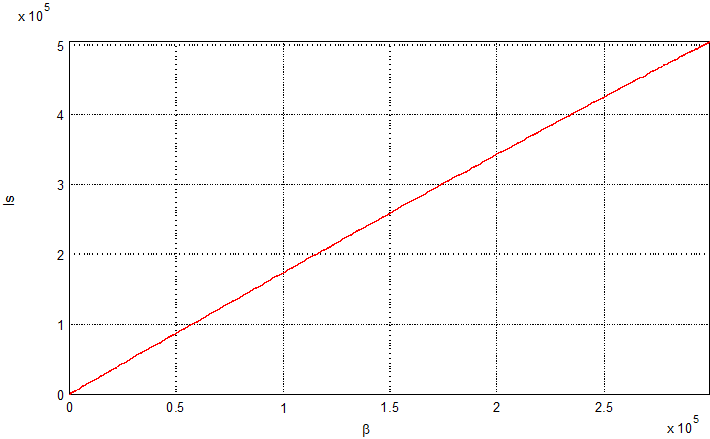
Graphic diagram of transfer function
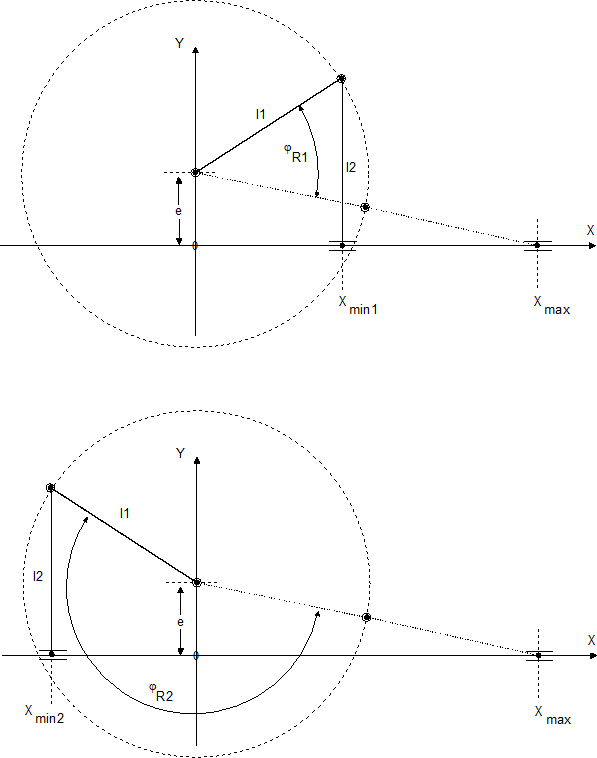
In the event of eccentricity e != 0 and specific parameter settings (e.g. (l2-l1) < e), there may be limits to the motor angle movement range because of jamming in the kinematic structure. In this case, the motor angle movement range of both solutions is smaller than 360 degrees (see figure below).
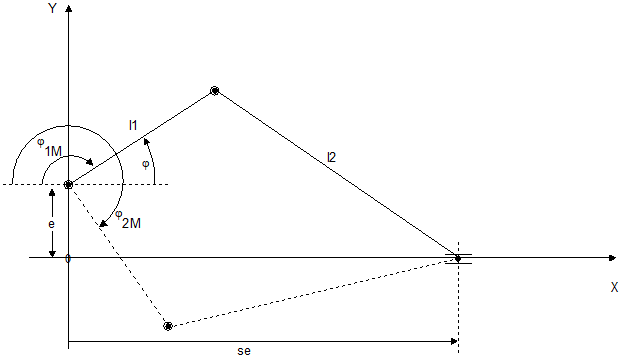
Extreme positions of slider crank with eccentricity
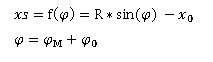
ID3: Eccenter
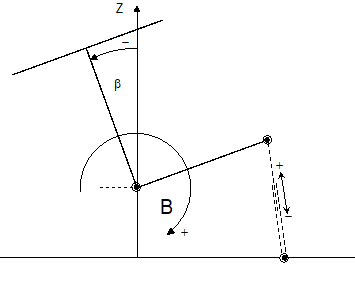
Kinematic diagram of the eccenter functionGraphic diagram of the eccenter function
trafo.command_pos.param[3] 0 (offset zero position)
trafo.command_pos.param[4] 0 (movement direction of rotary axis)
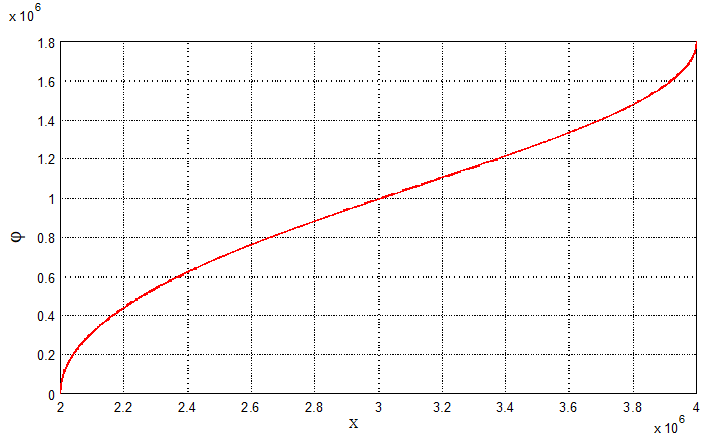
Graphic diagram of transfer function
If the kinematic (β=0) is in zero position, the transformation delivers the drive position 0 for ls. If necessary, by param[3] an offset to this position can be defined. (Example: Drive position at β=0 is 50mm -> the offset value has to be set on 50mm). Mathematically, the default rotational direction of the B axis is positive. This can be adapted by the parameter trafo.command_pos.param[4], see figure below.
Zero offset point of drive position
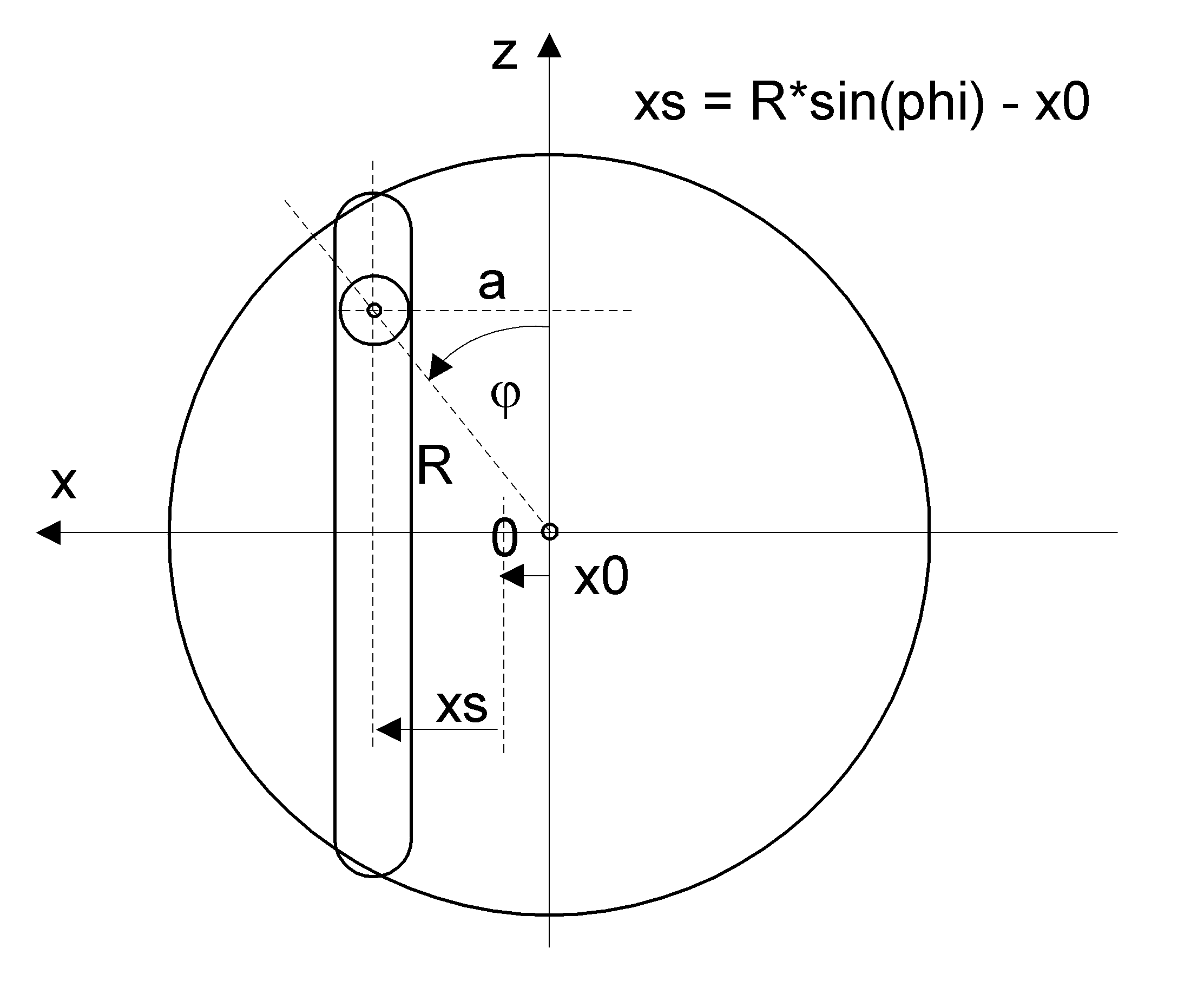
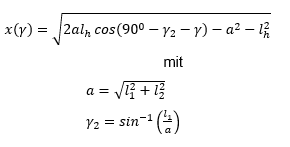
ID5: Angular kinematic
Available as of CNC Build V3.1.3107.41/V4.3.0.
A linear movement results from the angular movement.
The parameters specify the lengths l1,l2 and lh. The maximum excursions are defined by the parameters γmax andγmin.
Angular kinematic
Example:
trafo.command_pos.param[0] 1900000 (length of distance l1)
trafo.command_pos.param[1] 600000 (length of distance l2)
trafo.command_pos.param[2] 4428300 (length of distance lh)
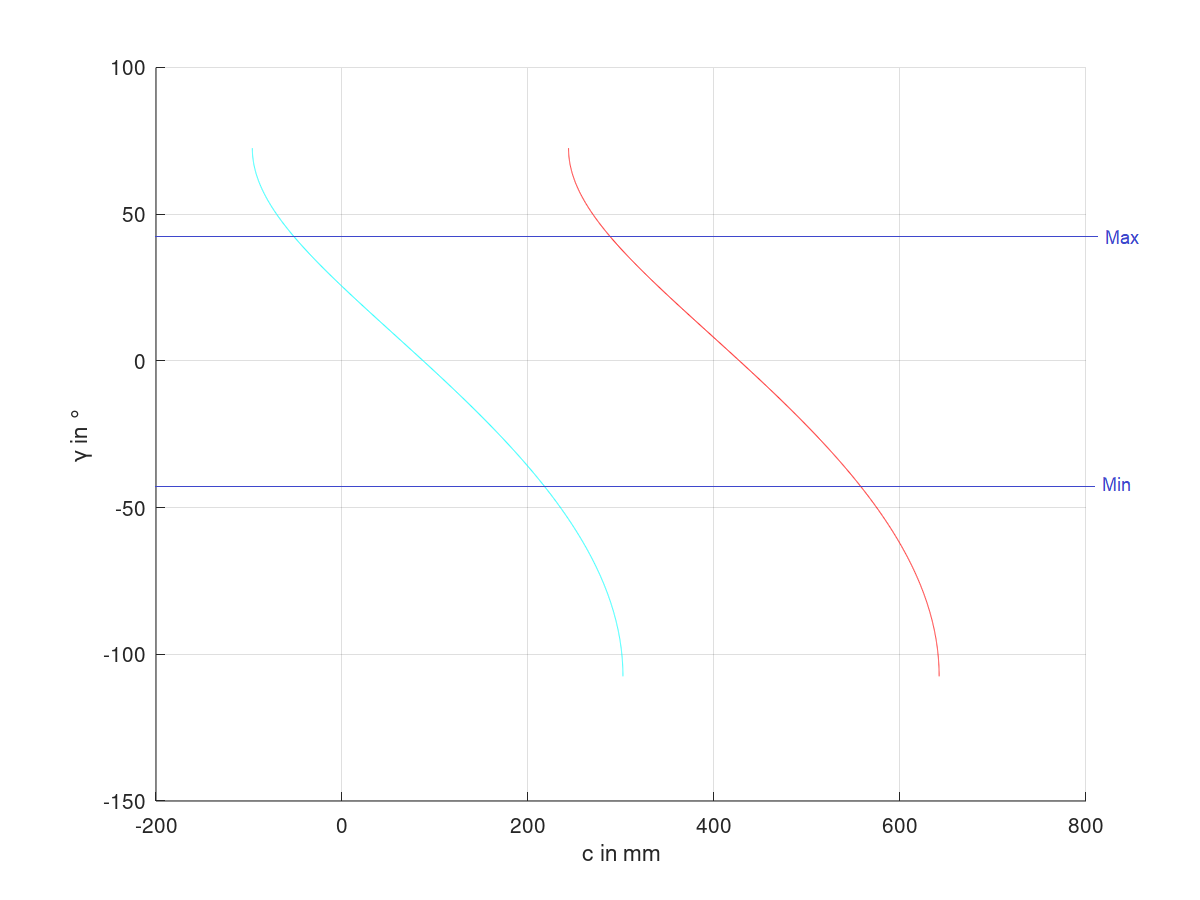
trafo.command_pos.param[8] 0/1 (linear position inversion)
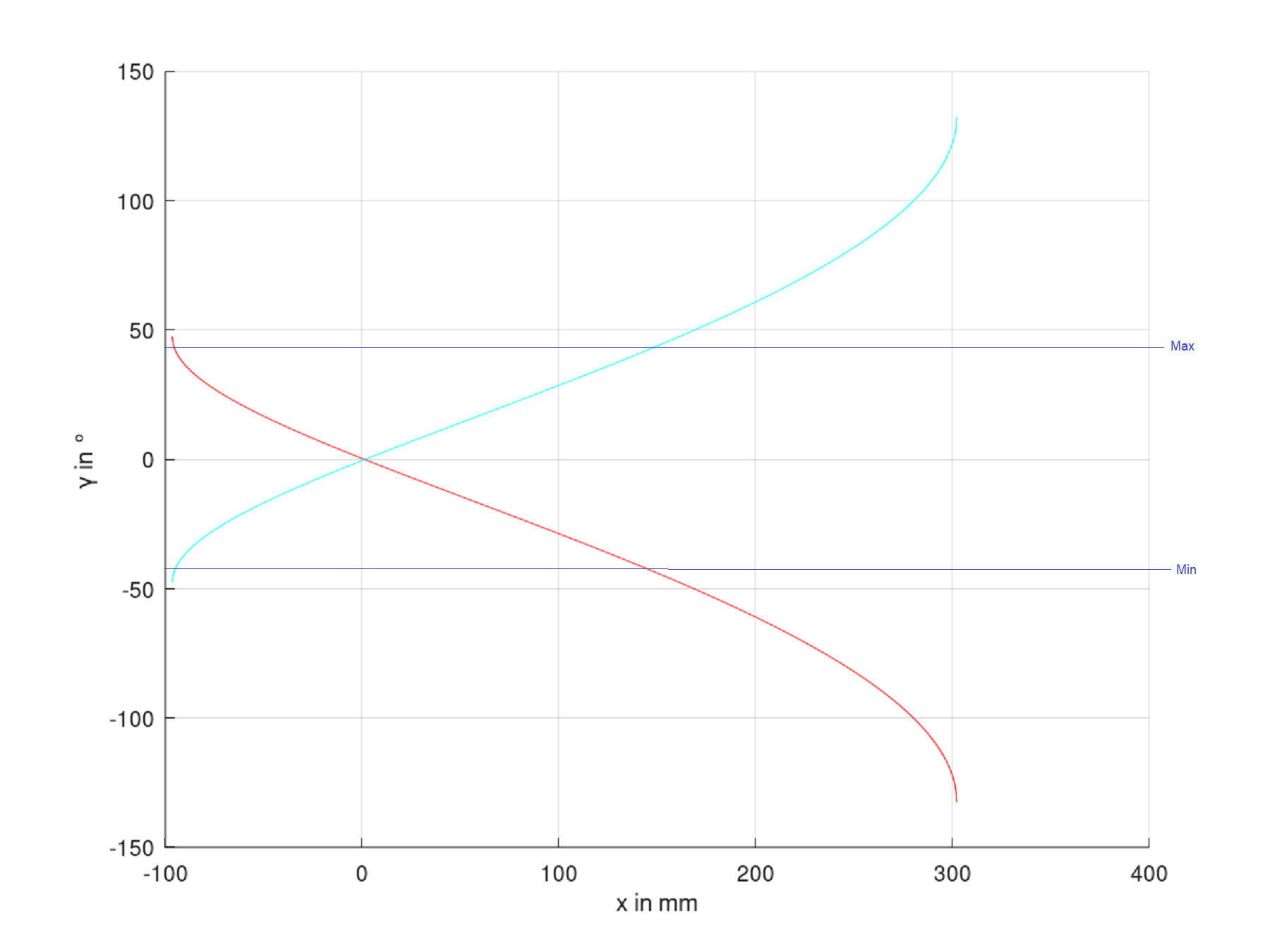
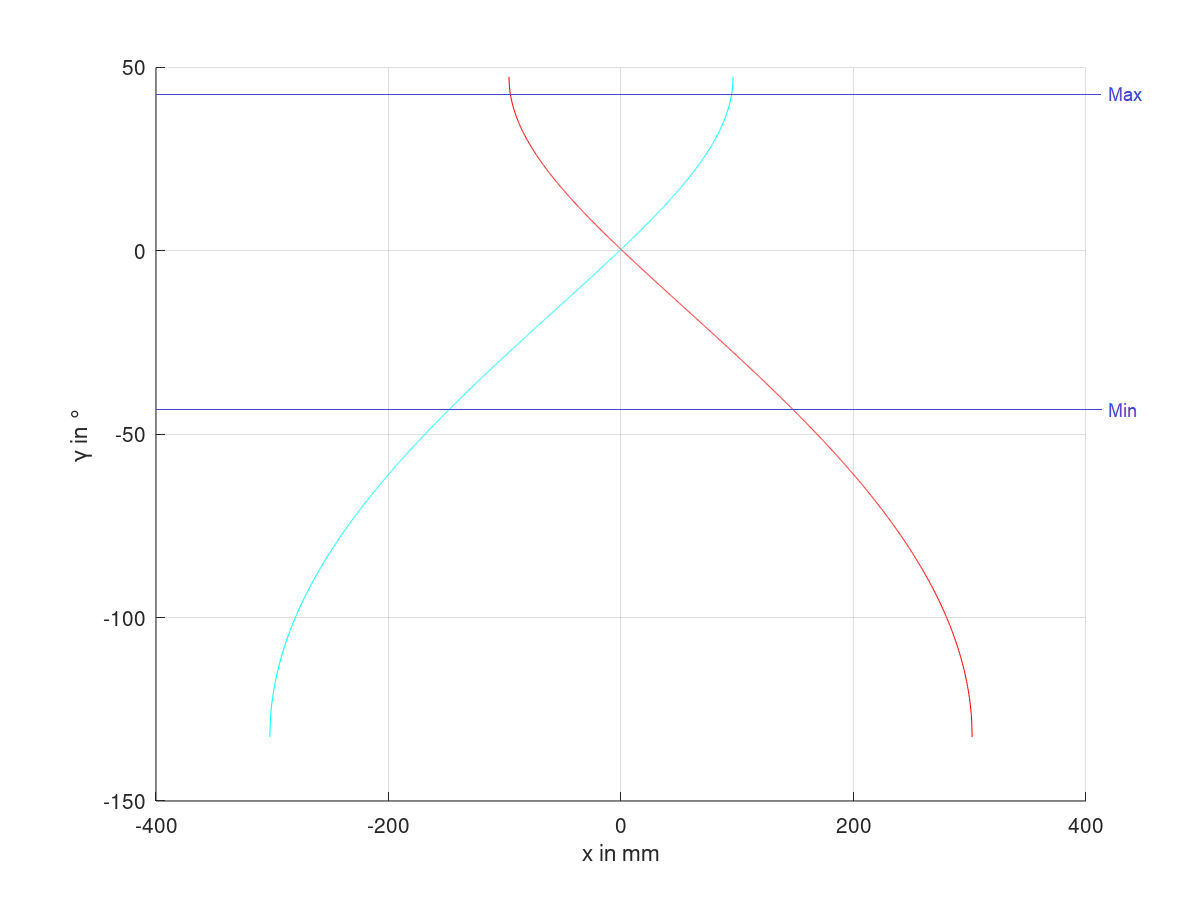
The following transfer function is with and without linear position inversion.
Red: without linear position inversion
Light blue: with linear position inversion
Transfer function with and without linear position inversion
As a general rule, the following applies:
The specified angle of the kinematic has mathematical limits due to the specified input variables. If they are not observed, error ID 70342 is output.
ID 6: Symmetrical slider crank
In addition to identical lengths of crank and con-rod, this structure has an additional mechanical coupling between these elements so that no mechanical jamming can occur in the centre position of the slider (linear position).
Symmetrical slider crank solution range 0 to 180 degrees:
Symmetrical slider crank solution range 180 to 360 degrees: