eMC_BUFFER_MODE
TYPE eMC_BUFFER_MODE :
A fundamental part of interpolated motion control is blending of (buffered) consecutive motion commands on an axes group. This enumeration lists the supported buffer modes.
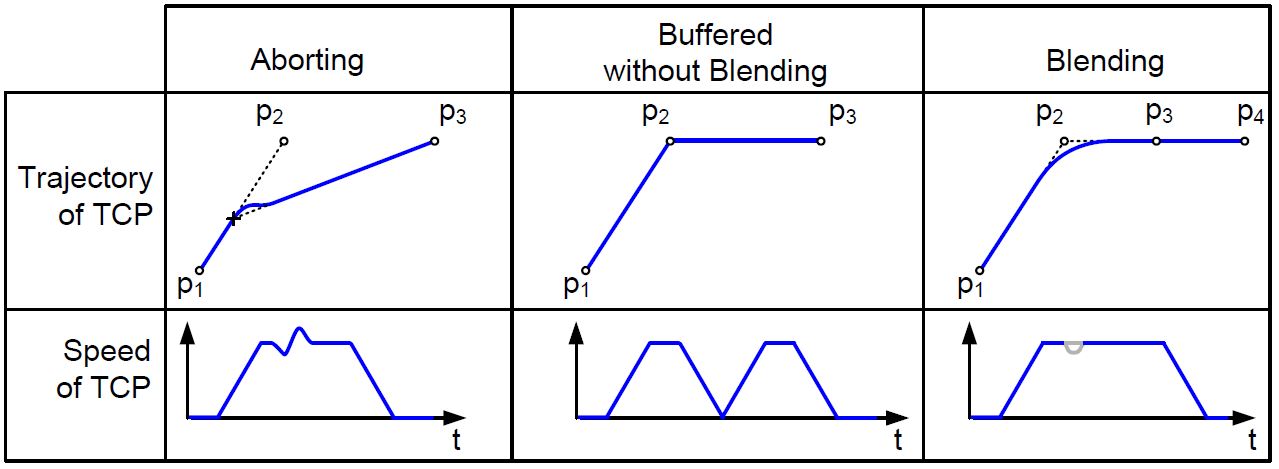 Fig.2: Trajectory of the TCP of two consecutive motion commands in three modes
Fig.2: Trajectory of the TCP of two consecutive motion commands in three modesSource: PLCopen - Technical Committee 2 – Task Force / Document: Function blocks for motion control version 2.0
Syntax
Definition:
TYPE eMC_BUFFER_MODE :
(
Aborting := 0,
Buffered := 1,
BlendingJoint := 6,
BlendingCartesian := 7
);
END_TYPEParameters
Name | Initial | Description |
|---|---|---|
Aborting | 0 | A FB with buffer mode “Aborting” aborts any ongoing motion and starts the new motion immediately |
Buffered | 1 | The next FB affects the axes group as soon as the previous motion is fully completed (Robot has reached commanded destination). |
BlendingJoint | 6 | The current and the next motion FBs are blended, so the axes group will not stop between the motions. During blending, the robot is performing a joint interpolated motion |
BlendingCartesian | 7 | The current and the next motion FBs are blended, so the axes group will not stop between the motions. The shape of the robot’s motion during the blending is a Bezier curve |