3D-Delta Type 1 (P_3C)
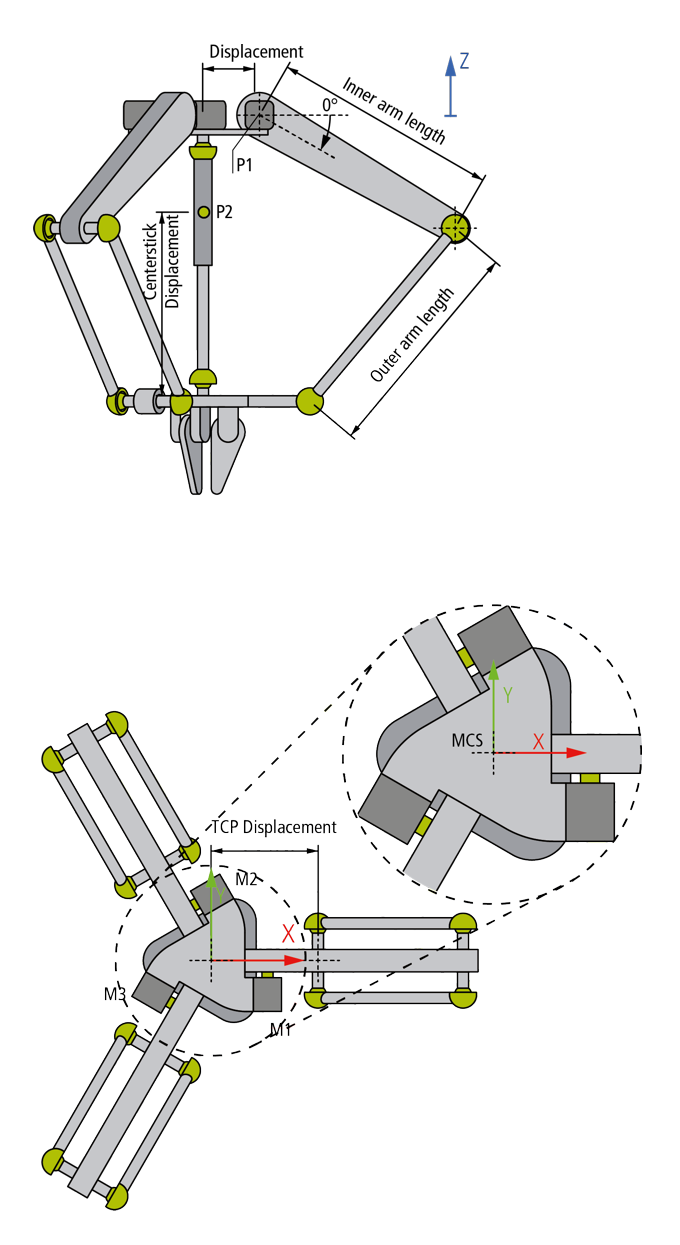
The 3D-Delta Kinematics Type 1 (P_3C) is configured as shown in the diagram above. The Kinematic Transformation expects ball joints (or elements with the same behavior) in the link between the arms and the lower plate.
Parameterization of the center stick for aligning the gripper is optional.
All motor axes are scaled in degrees; 0° is defined as shown in the diagram. The arrow indicates the positive direction. This applies for all three motors.
Parameters for the Kinematics
Parameter | Description | Type | Unit |
|---|---|---|---|
Inner arm length | Length between the pivot points of the inner arm; this is the arm that is directly linked with the motor. |
| mm |
Outer arm length | Length between pivots of the outer arm |
| mm |
Displacement | Length between the center of the base plate and the virtual rotation axes of the inner arm |
| mm |
TCP displacement | Length between the center of the gripper plate and the virtual rotation axes of the outer arm |
| mm |
Parameters for the Dynamic Model
Parameter | Description | Type | Unit |
|---|---|---|---|
Inner arm mass | Total mass of the inner arm |
| kg |
Inner arm moment of inertia | Moment of inertia of the inner arm in relation to pivot point P1, which is linked with the motor |
| kg mm^2 |
Outer arm mass | Mass of the outer arm. If two bars are used, the total mass is required. The mass of the joint can optionally be described as a separate parameter. |
| kg |
Link mass | Mass of the joint linking the inner and outer arm. Can be used if the mass of the joint is not already included in the outer and inner arms. |
| kg |
TCP mass | Mass of the TCP, including gripper plate and gripper. The payload is usually described with a separate parameter. |
| kg |
Center stick mass | Total mass of the center stick |
| kg |
Center stick: moment of inertia | Moment of inertia of the center stick in relation to the center of gravity (P2) |
| kg mm^2 |
Center stick: center of mass displacement | Length between the gripper plate and the center of gravity of the bar |
| mm |
First drive torque OID | Object ID of the first drive torque (see here) |
|
|
Second drive torque OID | Object ID of the second drive torque |
|
|
Third drive torqueOID | Object ID of the third drive torque |
|
|
General Parameters for the Kinematics
General parameters that apply to any kinematics are described in the following sections:
For all kinematics with tool also applies:
Requirements
Development Environment | Target System | TwinCAT Function |
|---|---|---|
TwinCAT V3.1.4018.26 | PC or CX (x86 or x64) | TF5112 TwinCAT 3 Kinematic Transformation (Level 3) |