FB_KinConfigGroup

The function block FB_KinConfigGroup is used to configure axes according to the kinematic transformation. These are axes for the ACS (joint) and the MCS (Cartesian). The function block takes the ACS and MCS axes defined in the stAxesList and configures them in the kinematic group of stKinRefIn.
 Inputs
Inputs
VAR_INPUT
bExecute : BOOL;
bCartesianMode : BOOL;
END_VARName | Type | Description |
|---|---|---|
bExecute | BOOL | The command is triggered by a rising edge at this input. |
bCartesianMode | BOOL | If FALSE, the ACS axes (joint) can be moved directly. If TRUE, the movement described in the MCS axes (Cartesian) is transformed into a movement of the ACS axes (joint). The ACS axes cannot be moved directly. |
 Inputs/outputs
Inputs/outputs
VAR_IN_OUT
stAxesList : ST_KinAxes;
stKinRefIn : NCTOPLC_NCICHANNEL_REF;
END_VARName | Type | Description |
|---|---|---|
stAxesList | ST_KinAxes | Determines the ACS and MCS axes included in the configuration. See ST_KinAxes. |
stKinRefIn | NCTOPLC_NCICHANNEL_REF | Determines the kinematic group of the configuration. |
 Outputs
Outputs
VAR_OUTPUT
bBusy : BOOL;
bDone : BOOL;
bError : BOOL;
nErrorId : UDINT;
END_VARName | Type | Description |
|---|---|---|
bBusy | BOOL | The output becomes TRUE when the command is started with bExecute and remains TRUE as long as the function block executes the command. While bBusy is TRUE, no new command is accepted at the inputs. If bBusy becomes FALSE again, the function block is ready for a new command. At the same time one of the outputs bDone or bError is set. |
bDone | BOOL | The output becomes TRUE when the command was executed successfully. |
bError | BOOL | The output bError is set to TRUE, if an error occurred during the command execution. |
nErrorId | UDINT | Contains the command-specific error code of the most recently executed command. Details of the error code can be found in the ADS error documentation or in the NC error documentation (error codes from 0x4000). |
Sample
VAR
io_X : AXIS_REF;
io_Y : AXIS_REF;
io_Z : AXIS_REF;
io_M1 : AXIS_REF;
io_M2 : AXIS_REF;
io_M3 : AXIS_REF;
in_stKinToPlc AT %I* : NCTOPLC_NCICHANNEL_REF;
fbConfigKinGroup : FB_KinConfigGroup;
stAxesConfig : ST_KinAxes;
bAllAxesReady : BOOL;
bExecuteConfigKinGroup: BOOL;
bUserConfigKinGroup : BOOL;
bUserCartesianMode : BOOL := TRUE;
(*true: cartesian mode - false: direct mode (without transformation) *)
END_VAR(* read the IDs from the cyclic axis interface so the axes can mapped later to the kinematic group *)
stAxesConfig.nAxisIdsAcs[1] := io_M1.NcToPlc.AxisId;
stAxesConfig.nAxisIdsAcs[2] := io_M2.NcToPlc.AxisId;
stAxesConfig.nAxisIdsAcs[3] := io_M3.NcToPlc.AxisId;
stAxesConfig.nAxisIdsMcs[1] := io_X.NcToPlc.AxisId;
stAxesConfig.nAxisIdsMcs[2] := io_Y.NcToPlc.AxisId;
stAxesConfig.nAxisIdsMcs[3] := io_Z.NcToPlc.AxisId;
IF bAllAxesReady AND bUserConfigKinGroup THEN
bExecuteConfigKinGroup := TRUE;
ELSE
bExecuteConfigKinGroup := FALSE;
END_IF
fbConfigKinGroup(
bExecute := bExecuteConfigKinGroup ,
bCartesianMode := bUserCartesianMode ,
stAxesList := stAxesConfig,
stKinRefIn := in_stKinToPlc ); State of the kinematic group
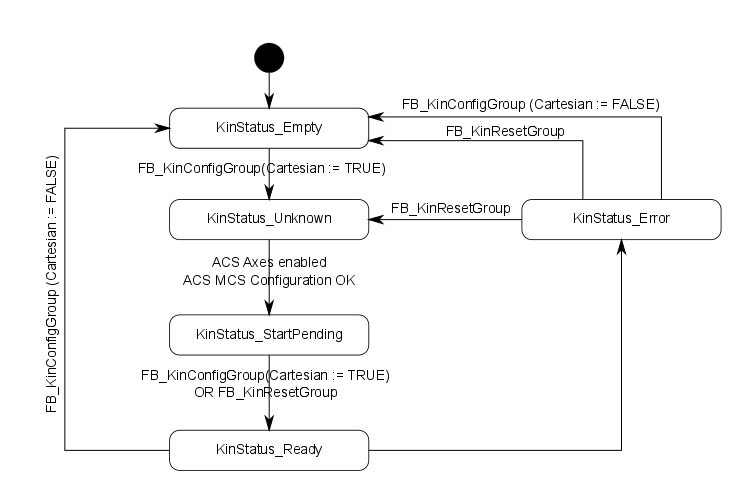
 | Enable configuration The ACS axes must be enabled through MC_Power, to ensure that the state can reach the value KinStatus_Ready. If the ACS axes are not enabled, enable the axes and then call up FB_KinConfigGroup or FB_KinResetGroup. |