Axes | Axis 1 | Ctrl
Controller
The purpose of the controller is to operate on the basis of setpoint velocities or other setpoint magnitudes (e.g. acceleration) and on the basis of setpoint magnitude differences as following errors. Controller operation is performed in a way to keep following errors as small as possible and to prevent any axis to undergo any overshots in position or velocity.
Supported is a wide variety of controller versions: Servo position controllers and special controllers for particular axis types.
Controller Types
- Position Controllers: Control the actual position to follow the setpoint position as precisely as possible. Position controller
P, following error proportional controller, position controller with twoPconstants, following error proportional controller with different constants for the stationary state and for movement, position PID-T1 controller with proportional acceleration feed forward. - Controllers for Axes: Servo axes, stepper motors, low-speed axes, high-speed axes.
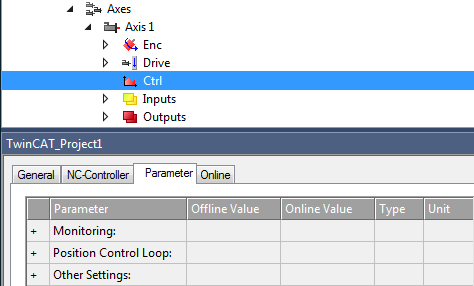
Under "MOTION | NC-Task 1 SAF | Axes | Axis 1 | Ctrl" the Parameter tab shows the parameter groups
- Monitoring,
- Position Control Loop,
- Other Settings.
Furthermore, the parameter groups
- Velocity Control Loop,
- Observer
can be displayed.
Controller Types and their Parameters
The following table lists the available controller types and shows what parameters configure (“x”) or do not configure (“-”) each one of them.
