Creating motion axes with "Joint" - Recommended procedure
In the first step of simulation preparation, you set up or adjust the parameters of the motion axes in the CAD model. The following is the recommended procedure for creating parameters in Autodesk® Inventor®. In this procedure, the constraint of the movable part is defined with the "Joint" function. In the following example, place the origin of a joint at the top of the linear guide on the miller and select a surface along the linear guide as the joint plane.
 | For the simulation, it does not matter which units are set in the assemblies. The motion axis and displacement sensor units are set in TwinCAT. |
- You do not need to set any constraints between the two assemblies or parts.
- Parts can be rotated or moved in the desired direction of movement.
- Parts or assemblies which move relative to each other are placed next to each other.
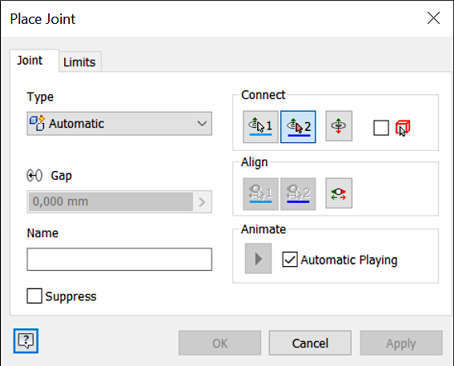
- 1. Click Assemble>Relationships>Joint.
- The following window opens:
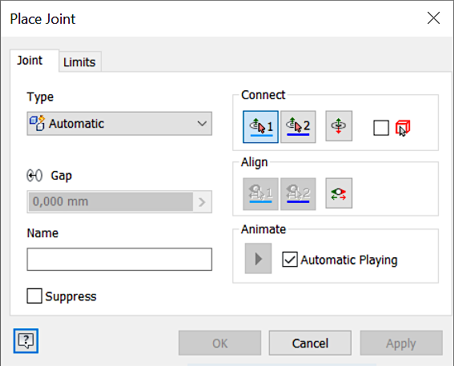
- 2. Select the desired joint type under Type.
This can be "Slider", "Rotational" or "Automatic", for example. With the “Automatic” joint type, Autodesk® Inventor® automatically selects the joint type depending on the components to be connected. - 3. To select the origin of the joint on the first assembly or part, click the 1 button under Connect.
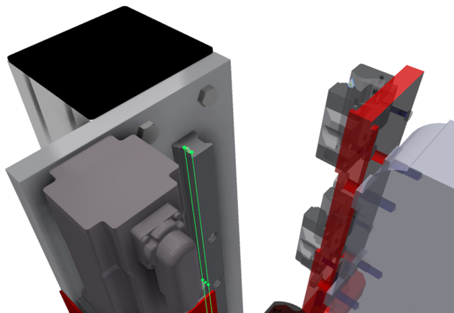
- 4. Now select the corresponding point in the CAD model. Pay attention to the joint plane here.
- In the picture, you can see that the origin is placed at the top of the linear guide on the miller.
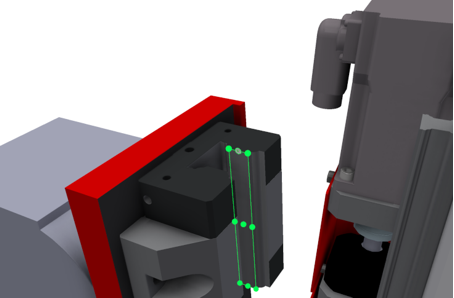
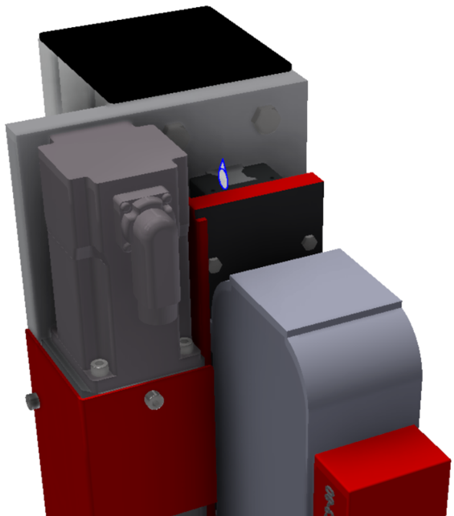
- The following negative example shows how the same point was selected, but it is on the wrong joint plane.
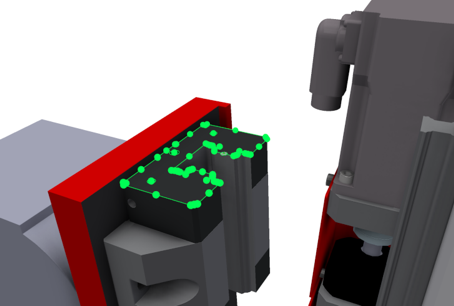
- Autodesk® Inventor® now automatically activates the button 2 and you can define the second point of the joint.
- 5. Set the second point of the joint on the second assembly or part by selecting it in the CAD model.
- After successful joint definition (no conflicts) Autodesk® Inventor® animates the joint. If you click on the joint in the model tree, then the joint origin as well as the (positive) direction of movement is displayed in Autodesk® Inventor®.
If required, you can adjust the direction of movement later in TwinCAT via the TcCom options with "InvertDirection". It may also be easier to adjust the joint origin via the TcCom option Offset in TwinCAT than in Autodesk® Inventor®. This is the procedure we recommend. - 6. Click Parameters under Assemble>Manage.
- The following window opens:
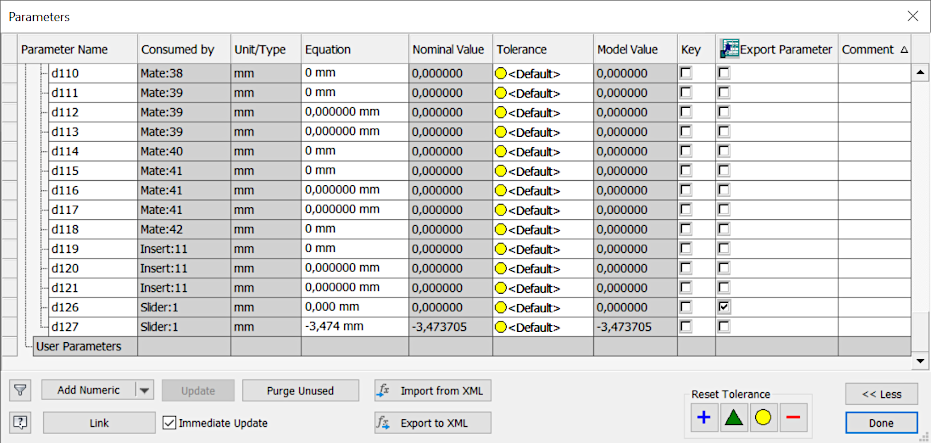
- The bottom two rows belong to the defined slider joint. The parameter "d126" describes the distance between the two selected joint planes. Parameter "d127" describes the travel distance. Only "d127" is relevant for TwinCAT 3 Interface for Inventor®. We recommend that parameters be given a unique name.
- 7. To rename the parameter, click in the left column of the table.
- 8. Enter the desired name. Note that there is the option to assign prefixes which can then be used for filtering later.
- 9. Confirm with Done.
- The slider joint is now defined in the corresponding assembly and can be moved within this assembly.
- 10. If necessary, configure the TwinCAT 3 Interface for Inventor® before initializing the runtime.
- 11. Initialize the runtime in Autodesk® Inventor® or use the ScanIO function in your TwinCAT project.
- 12. Link the I/O master inputs to the relevant inputs in the PLC project. Link the individual I/O master outputs with an output of an NC axis or a suitable output in the PLC project.
See chapter I/O master set up in TwinCAT. - 13. Activate the TwinCAT project.
- The query asking whether the TwinCAT system should be started in Run Mode appears.
- 14. Confirm with OK.
- The simulation is activated, but is in the pause state.
- 15. To trigger the runtime, click the Continue button in the TE1130 Inventor® add-in.
- The simulation is active and the TwinCAT project is triggered by the Usermode Runtime.