TwinCAT System Control
The TwinCAT System Control is a dialog-based application with a separate side for each supported system area.
The tabs:
"General" tab:
General

On the first side, the user can find general information on the installed TwinCAT version. Whenever contacting TwinCAT Hotline, please always state the data entered here.
"System" tab:
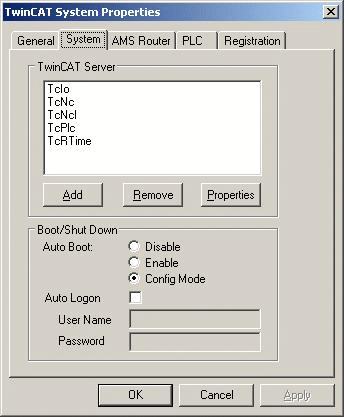
This page shows the basic configuration of the TwinCAT system. Here, TwinCAT servers can be added and removed, and the automatic system start can be activated.
Enable Auto Logon:
Here you select 'Enable Auto Logon' and enter your user name and your password. Windows NT accepts this setting once you confirm with 'OK'. If you do not enter a password at this stage, the automatic login will only function once (this is a property of Windows NT).
Cancelling automatic logging in:
In order to stop automatic logging in although the setting has been made, it is necessary to hold the shift key pressed during the login. This interrupts the Auto Logon, and you can then log into Windows NT in the usual way.
TwinCAT can be extended by additional servers. These can be cam switch mechanisms, linear pass controls or other software units. The modularity of TwinCAT now enables this server to be loaded into the TwinCAT system by simple configuration. However, a condition is that the server was compiled with the TwinCAT Server Framework. For Windows NT, TwinCAT servers can be used as unit drivers, thereby enabling the operating state of the TwinCAT server to also be checked in the Windows NT units list.
Important:
Changes on the system side should only be carried out by experienced TwinCAT users or in accordance with the instructions from the TwinCAT Support.
Add TwinCAT servers
This function is necessary when a TwinCAT server is not reported with the system by the standard installation. This can be the case with application-specific TwinCAT servers.
Name
This is the Windows NT unit name. This name addresses the TwinCAT server of Windows NT. In the case of TwinCAT servers, the unit name corresponds to the file name of the TwinCAT server.
Display name
Only used for displaying the Windows NT system, and can be freely issued.
File path
Path to the binary file of the TwinCAT server.
Type
At present, only Windows NT drivers can function as TwinCAT servers. "DriverType" must therefore be entered here. In future, Win32 services will also be able to operate as TwinCAT servers.
Start mode
TwinCAT servers are started by the TwinCAT System Service. The standard setting is therefore "manual" in this case. A start via Windows NT could be necessary for special TwinCAT servers, which means that the start mode can be changed here.
Remove TwinCAT Server:
When this dialog is acknowledged with OK, the TwinCAT server is removed from the TwinCAT system and from Windows NT. The binary file of the TwinCAT server is, however, not deleted from the hard disk.
Properties of a TwinCAT server
Double clicking on the server name in the server list or pressing the "Properties" button opens the above dialog.
In this dialog, the properties of a TwinCAT server (e.g. the path) can be adapted later.
"AMS Router" tab:
AMS Router
The local machine address, the reserved memory and the connections to other TwinCAT systems are defined in the settings for the AMS Message Router.
AMS Net Id
This is the address of the local computer in the TwinCAT network. The "AMS Net Id" consists of 6 bytes and is represented in a point notation. The "Net Ids" must be issued by the project supervisor and must not be re-peated in the TwinCAT network. A standard + "1.1" is generated from the installation of an AMS Net Id from the IP address of the system (if present). If no IP address can be determined during installation. the AMS Net Id ".1.1.1.1.1.1" is generated.
Remote Computer
List of TwinCAT systems which can be reached in the TwinCAT network.
Add remote connection
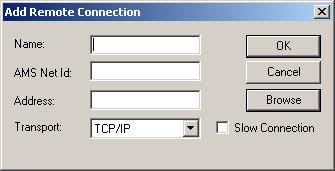
New connections to other TwinCAT systems can be configured with the aid of this dialog.
Browse:
It is possible to search for the remote computer via this dialog. After selecting the remote computer, the IP address is fetched and the AMS Net Id is automatically generated. This Net Id corresponds to the standard Net Id following installation.
Name
Symbolic name of the TwinCAT system removed. This name can be freely issued.
AMS Net Id
Address of the removed TwinCAT system.
Address
System address referred to the relevant transport shift. In the above example, TCP/IP is used as the transport shift, whereby the address is interpreted as the IP address.
Transport
The transport shift with which the AMS messages are carried. At present, only TCP/IP is supported as the transport shift.
Slow connection(Langsame Verbindung)
mark up as slow connection
Remove a system from the remote list
After acknowledgement of the dialog, "Machine" is irrevocably removed from the remote list.
Properties of the remote connection
A remote connection can be subsequently adapted with this dialog.
Further information of the remote connection are described in the documentation TwinCAT Remote Access Service.
"PLC" tab:

The PLC subsystem is configured with the PLC side of the TwinCAT System Control.
Number of run-time systems
The TwinCAT PLC subsystem supports up to 4 run-time systems. The number of run-time systems is set via the above control element.
Boot project path
A separate boot project can be generated for each PLC run-time system. the path from which the boot project should be loaded must be configured here.
Search
To support the user, the boot project path can also be entered via this dialog
Boot project
The loading of a boot project can be activated separately for each run-time system. The boot project of a run-time system is activated or deactivated by a mouse click on the corresponding line. To generate a boot project, start the TwinCAT PLC Control. In the Online menu you will find the selec-tion "Generate a boot project".
Load/store of the retain data
If a boot project is selected for a run-time system, remanent data can also be loaded or written for this run-time system. This option can be selected and deselected via the adjacent selection box.
"TwinCAT registration":
TwinCAT registration
TwinCAT Version
Existing product version
System Id
Unambiguous identification of the local system. State this combination of numbers when registering TwinCAT.
Registration
The registration key which matches the TwinCAT version and the defined system ID. This key is obtained when TwinCAT is registered.
Online
Currently not supported.
Fon
Call number for registering TwinCAT