Effector coordinate system (ECS)
 | In combination with kinematic transformations the use of this feature requires the license for the extension package "Transformations". |
The Effector-CS is used mainly to perform a withdrawal-strategy in case of tool fracture, NC-reset, or abortion of NC-program while machining with the tool oriented arbitrarily. Determination of the ECS is the inversion of the command TOOL ORI CS, i.e. instead of aligning the tool to the machining plane here a machining plane perpendicular to the current tool axis will be determined.
#ECS ON Selection of ECS (modal)
#ECS OFF Deselection of ECS (modal)On activation of the ECS any other CS must not be active.
Out of the positions of the orientation axes the ECS will thus be determined, that its z-axis is in parallel to the current tool axis. Thereby the location of the X- and Y-axis is undefined (arbitrary) and must therefore be predefined internally. The origin of the ECS may generally be located outside of the tool tip or tool axis, i.e. a collision free withdrawal is only guaranteed by incremental traversing along the effector z-axis direction.
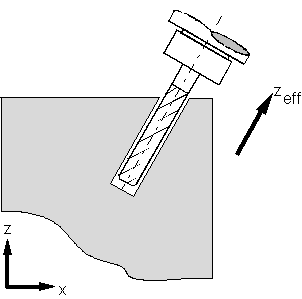 Fig.111: Machining in an inclined drilling
Fig.111: Machining in an inclined drillingProgramming example
N05 #CS ON[1.5,0,32,14.5,0,45] (Activation of a CS)
N10 #TOOL ORI CS
N15 X0 Y0 Z0
N20 LL TEILEPRG (Subroutine call for machining)
...
(Tool fracture, NC-reset)
(Withdrawal strategy)
N05 #ECS ON (Determination of the cartesian transformation)
(according to the positions of the orientation)
(axes)
N10 G91 G01 F200
N20 Z62 (Withdrawal movement along the tool- or ECS-Z-axis res.)
...
N400 M30