Rotation tool center point (RTCP)
 | The use of this feature requires the license for the extension package "Transformations". It is not included in the scope of the standard license. |
#TRAFO ON Selection RTCP (modal)
#TRAFO OFF Deselection RTCP (modal) | For compatibility reasons alternative the tool compensation in space can also be programmed by #RTCP ON / OFF. |
RTCP represents a tool compensation in the space.
After RTCP has been selected, the contact point of the current tool remains stationary with respect to the work piece when the tool orientation is changed (note the assignments of the tool tip offset parameters [1]-24, [5] for the parameter value assignments of the kinematics transformation).
The RTCP function may not be selected when TLC is active (see chapter Tool length compensation (TLC)).
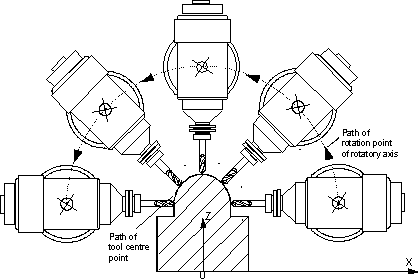
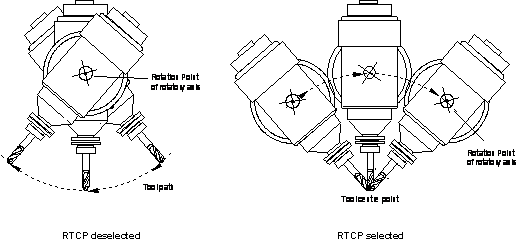 Fig.102: RTCP movement control
Fig.102: RTCP movement controlAt the left side of Fig. 102 the resulting movement is shown, if the rotatory machine axis is moved.
RTCP shifts the center point of rotation into the tool tipp (center point of tool rotation). The resulting offsets in the axes X, Y, Z based on the tool movement are compensated in each cycle by corresponding opposing movements.
Only the axes X, Y, Z are output of kinematic transformation, the rotatory machine axes are programmed as usual.
Programming example 1
N10 T1 D1 (Selection of the 2½-D tool correction)
N20 #TRAFO ON (Selection of RTCP)
N30 G01 F100 B45 C30 (Programming the rotary axes modifies tool)
(orientation. Tool contact point remains sta-)
(tionary)
N40...
.
.
N100 #TRAFO OFF (Deselection of RTCP)
N200 M30Programming example 2
:
N10 #KIN ID [1] (Selection of machine kinematic)
N20 #TRAFO ON (Selection of RTCP)
N30 G01 G18 X20 Y0 Z25 B90 F500 (Move workpiece from the right side)
N40 G91 X-8 (Move to start position)
N50 G90 G02 X-12 I-12 B-90 F2000 (Processing)
N60...
: