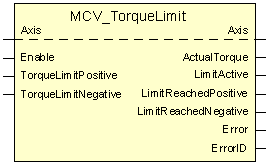
MCV_TorqueLimit
The MCV_TorqueLimit function block limits the maximum torque of the drive for every motion direction independently.
Block diagram
Parameters of the function block
VAR_IN_OUT | |||
| Axis | AXIS_REF | Axis reference. |
VAR_INPUT | |||
| Enable | BOOL | If "Enable’ = TRUE, the torque limitation is active. |
| TorqueLimitPositive | INT | Maximum torque of the drive in the positive direction of motion. Unit [0.1%]. |
| TorqueLimitNegative | INT | Maximum torque of the drive in the negative direction of motion. Unit [0.1%]. |
VAR_OUTPUT | |||
| ActualTorque | INT | Currently effective torque of the drive. Unit [0,1%] |
| LimitActive | BOOL | Torque limitation is activated. |
| LimitReachedPositive | BOOL | The maximum torque for the positive direction of motion has been attained. |
| LimitReachedNegative | BOOL | The maximum torque for the negative direction of motion has been attained. |
| Error | BOOL | Indicates if an error has occurred. |
| ErrorID | WORD | Error identification. |
Behavior of the function block
- The torque limit can always be specified whenever the ISG-MCP has been initialized correctly.
- The torque limit must be specified separately for each motion direction of the axis. If no value is specified for the torque limit via the "TorqueLimitPositive" or "TorqueLimitNegative" inputs, the default of 100% is specified by the FB. Input values less than 0% and more than 130% are limited to 0% or 130% without any further acknowledgement.
- The MVC_PosLagMonitor function block is used to deactivate following error monitoring.
- The "LimitReachedPositive" and "LimitReachedNegative" outputs become TRUE whenever the currently acting torque corresponds to at least 95% of the torque commanded via this FB.