Settings tab
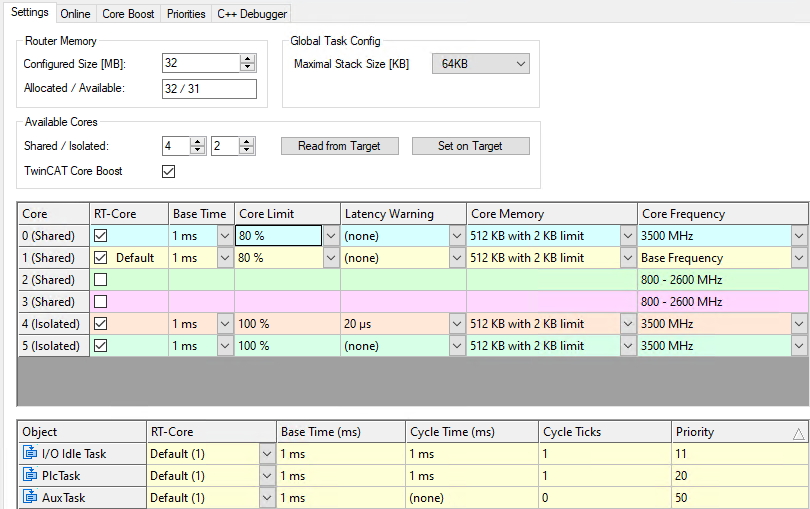
Router Memory (MB) | Size of the router memory: Used to set the size of the router memory (see also note below the table). |
Global Task Config/ Maximal Stack Size [KB] | Sets the stack size per task in kilobyte. This setting applies to all real-time tasks in the system. |
Available Cores (Shared/Isolated) | Number of available cores (Windows cores and isolated cores) |
Read from Target | Reads the number of available cores from the target system or from the local system. |
Set on Target | Sets the distribution between shared and isolated cores on the target system or on the local system. |
TwinCAT Core Boost | Available from TwinCAT 3.1 Build 4026 Activates the TwinCAT feature Core Boost. If this function is active and is supported by the current target system, the clock frequency can be fixed for each real-time core used by TwinCAT. The choice is made in the Core Frequency column. |
Core | Contains the number of a core that can be selected for runtime operation. Brackets after the number indicate whether the core is shared or isolated. |
RT-Core | Cores can be selected and deselected row by row in the RT-Core column of the upper table. The selected cores can then also be selected in the drop-down lists in the RT-Core column of the lower table. In this way, a task in a row can be assigned to one core at a time. |
Base Time | Base time of the core: Drop-down menu options: no base time, 1 ms, 500 µs, 333 µs, 250 µs, 200 µs, 125 µs, 100 µs, 83 µs, 3 µs, 76.9 µs, 71.4 µs, 66.6 µs, 62.5 µs and 50 µs. If the value of the base time is set to "(none)", then it is possible to use TwinCAT without real-time. Versions that do not require real-time, such as AMS Router, TwinCAT Scope, ADS OCX, continue to operate without restrictions. Execution of real-time tasks is not possible with this setting. |
Core Limit | Maximum percentage of core occupied by TwinCAT real-time. Drop-down list options: 10 %, 20 %, 30 %, 40 %, 50 %, 60 %, 70 %, 80 %, 90 % and 100 %. The rest of the CPU is guaranteed to be reserved for the operating system and thus also for user interface programs on shared cores. The value "Core Limit" can be set very high since it is automatically reset to Windows when the real-time task has completed its cycle. |
Latency Warning | The TwinCAT real-time cyclically measures the actual length of the base time. Due to the PC architecture, this may show slight fluctuations compared to the set base time. A limit value can be set in the drop-down menu; if this value is exceeded, a warning is generated by the TwinCAT system. Drop-down menu options: "(none)", 20 µs, 50 µs, 100 µs, 200 µs, 250 µs and 500 µs. |
Core Memory | Size of real-time memory reserved for this core |
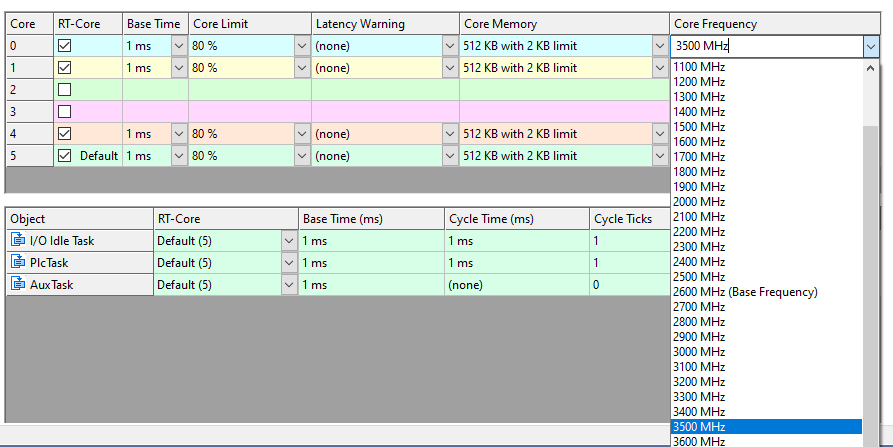
Core Frequency | If the TwinCAT feature Core Boost is active and is supported by the target system, a drop-down menu with the possible clock frequencies that can be set for this core is displayed in this column for each real-time core. If this function is deactivated, Base Frequency is displayed in this column. |
Object | Name of the TwinCAT object that is called cyclically. |
Cycle Time (ms) | Cycle times of the tasks |
Cycle Ticks | Number of ticks in a cycle |
Priority | Priority of the respective task in the TwinCAT system: The smaller the number specified here, the higher the priority of the task within the TwinCAT system. |
Router memory:
TwinCAT 3.1 versions up to and including Build 4024:
There is a global real-time memory that is used for ADS communication and for memory requests from real-time. The size of the memory can be defined via the above mentioned option in the System Manager and becomes active after a reboot of the computer.
TwinCAT 3.1 from Build 4026:
The router uses separate memory areas for ADS communication between the devices and for memory requests from the real-time. The memory area for requests from real-time can be set via the above mentioned option in the System Manager and becomes active when the Solution is activated. The ADS communication memory is created when the system boots and is approximately 25 % of the size of the memory previously set up for real-time requests. The size is limited between 4 MB and 32 MB. This memory remains permanently until the next restart of the system.
Isolated cores:
In TwinCAT 3.1, it is possible to isolate cores. The isolated cores are then no longer known to the guest operating system, so that only real-time tasks are executed on these cores (see chapter Basics -> Real-Time). Starting with the 12th and 13th generations of Intel® processors and BIOS version 0.14, as well as TwinCAT 3.1 version 4026.18 or newer, it is possible to differentiate whether efficiency or performance cores are isolated.
TwinCAT Core Boost
 | Prerequisite: Both the engineering environment and the runtime environment must use at least TwinCAT version 3.1.4026.6. |
If the TwinCAT feature Core Boost is supported for a given target system and is active, this is displayed in the TwinCAT Core Boost selection box after pressing the Read from Target button. To activate or deactivate the function, these settings must be activated on the target system using the Set on Target button. You must restart the computer after changing this setting.
If the TwinCAT Core Boost function is not supported by a given target system, the following message appears after pressing the button Set on Target:
If the TwinCAT Core Boost setting is activated, a clock frequency can be defined for each real-time core. If no clock frequency is defined for a real-time core, the Base Frequency is automatically selected.
| Correct selection of the core frequency TwinCAT automatically monitors the clock frequencies of the individual cores based on the limits stored in the system for the temperature of the individual cores or the power consumption of the individual packages. If these limits are exceeded, TwinCAT reduces the clock frequencies of the individual cores accordingly (see also chapter Core Boost tab). If TwinCAT is forced to reduce the clock frequencies of individual real-time cores, this may have an influence on the real-time behavior set in TwinCAT. The tasks executed on this real-time core then have longer execution times, which may lead to cycle timeouts. You therefore share the responsibility for selecting the clock frequencies of the real-time cores in such a way that TwinCAT is not permanently operated in throttle mode. If the temperature limit is permanently exceeded, the system may shut down. |
| Selecting the clock frequency for non-real-time cores Non-real-time cores are computer cores on which TwinCAT is not activated and which are not used in real-time, so that only processes triggered by the operating system are executed there. For the non-real-time cores, the clock frequency is automatically selected by the operating system as required. The maximum clock frequency up to which non-real-time cores can clock up is the base frequency. Starting with the 12th and 13th generations of Intel® processors, non-real-time cores can overclock up to the core boost frequency if necessary. The level of the core boost frequency is stored in the system and differs depending on the processor type. |
Configurable clock frequencies:
Processor | Processor generation | Base clock | Configurable Core Boost clock |
|---|---|---|---|
Core i3-11100HE | Intel® Core™ of the 11th generation | 2.40 GHz | 4.00 GHz |
Core i5-11500HE | Intel® Core™ of the 11th generation | 2.60 GHz | 4.10 GHz |
Core i7-11850HE | Intel® Core™ of the 11th generation | 2.60 GHz | 4.20 GHz |
Core i3-13100E | Intel® Core™ of the 13th generation | 3.30 GHz | 4.20 GHz |
Core i5-13400E | Intel® Core™ of the 13th generation | 2.40 GHz | 4.10 GHz |
Core i7-13700E | Intel® Core™ of the 13th generation | 1.90 GHz | 4.00 GHz |
Core i9-13900E | Intel® Core™ of the 13th generation | 1.80 GHz | 3.90 GHz |
Special tasks:
I/O Idle Task:
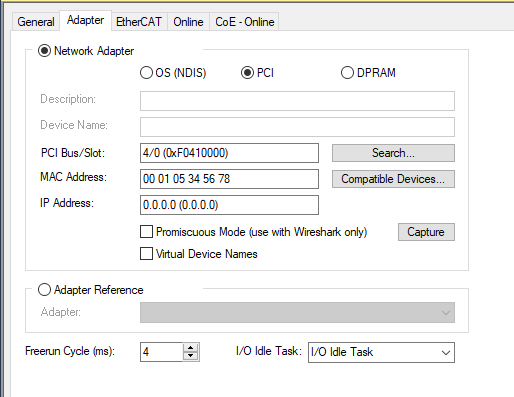
The I/O Idle Task executes the asynchronous mappings and is also responsible for the acyclic communication with the EtherCAT devices (e.g. writing of parameters).
From TwinCAT 3.1 Version 3.1.4026 there can be a separate I/O Idle Task for each EtherCAT master. You can select these in the adapter settings of an EtherCAT master in the I/O Idle Task selection box.
PlcAuxTask:
The PlcAuxTask is used for communication between the PLC editors and the PLC runtime modules. This includes the download and Online Change of PLC control code as well as debugging (monitoring of values, setting of breakpoints, etc.). In addition, the PlcAuxtask also processes the ADS messages that are sent to the runtime system independently of the development environment (TcXaeShell) (e.g. from an HMI).