Characteristic curve-controlled acceleration
Servo and main spindle motors can be exploited better with digital drive technology than is possible with analog technology, i.e. the motors can be operated closer to their performance limits.
To be able to fully exploit a motor during acceleration, it is possible to operate it at its commutation limit characteristic. This characteristic defines the maximum available torque as a function of speed. It can be stated that motors can sometimes output 1.5 to 2 times higher torque up to half the nominal speed in comparison with the nominal speed.
For an endlessly rotating spindle, it is possible to set setpoint generation in accordance with such a speed-dependent acceleration characteristic.
The course of acceleration is typically constant in the lower speed range and, as from a speed limit nlimit, drops in accordance with a specified characteristic:
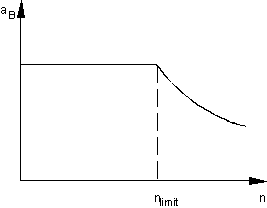 Fig.13: Acceleration characteristic as a function of the speed
Fig.13: Acceleration characteristic as a function of the speedAs this acceleration characteristic varies for the individual gears of a spindle, a corresponding record must be provided for each gear.
Two methods are available for defining the acceleration characteristic, and these can be selected via the machine parameter P-AXIS-00202.