Installation of the TwinCAT real-time driver
In order to assign real-time capability to a standard Ethernet port of an IPC controller, the Beckhoff real-time driver has to be installed on this port under Windows.
This can be done in several ways. One option is described here.
In TwinCAT 3, the TwinCAT overview of the local network interfaces can be called up via the menu "TwinCAT" → Show real-time Ethernet compatible devices:
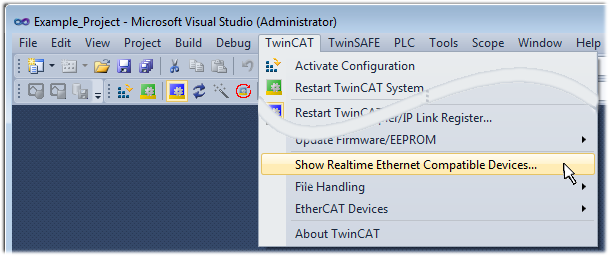 Fig.58: Call in VS Shell (TwinCAT 3)
Fig.58: Call in VS Shell (TwinCAT 3)The following dialog appears:
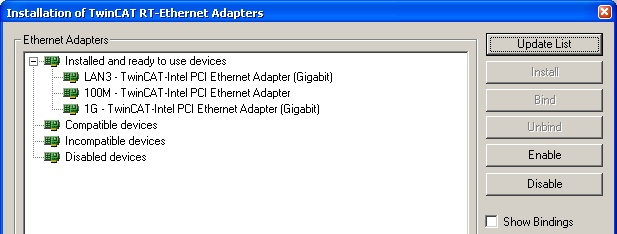 Fig.59: Overview of network interfaces
Fig.59: Overview of network interfacesInterfaces listed under “Compatible devices” can be assigned a driver via the “Install” button. A driver should only be installed on compatible devices.
A Windows warning regarding the unsigned driver can be ignored.
Alternatively, as described in the chapter Offline configuration creation, section "Creating the EtherCAT device", you can first enter an EtherCAT device and then view the compatible Ethernet ports via its properties ("Adapter" tab, "Compatible Devices..." button):
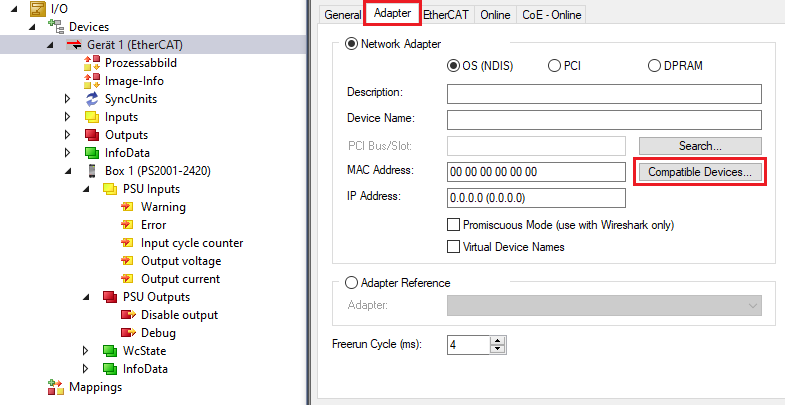 Fig.60: Properties of EtherCAT device (TwinCAT 3): Click on "Compatible Devices..." from "Adapter"
Fig.60: Properties of EtherCAT device (TwinCAT 3): Click on "Compatible Devices..." from "Adapter"TwinCAT 3: the properties of the EtherCAT device can be opened by double click on “Device .. (EtherCAT)” within the Solution Explorer under “I/O”:
After installation, the driver appears enabled in the Windows overview of the individual network interface (Windows Start → Control Panel → Network)
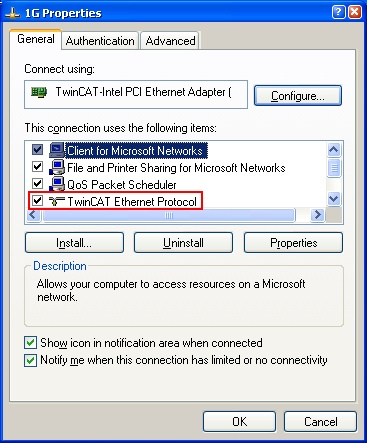 Fig.61: Windows properties of the network interface
Fig.61: Windows properties of the network interfaceA correct setting of the driver could look like this:
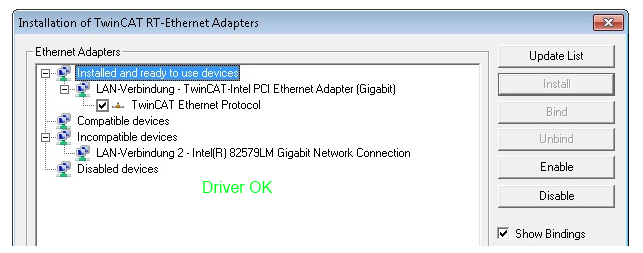 Fig.62: Example of the correct driver setting for the Ethernet port
Fig.62: Example of the correct driver setting for the Ethernet portOther possible settings are to be avoided:
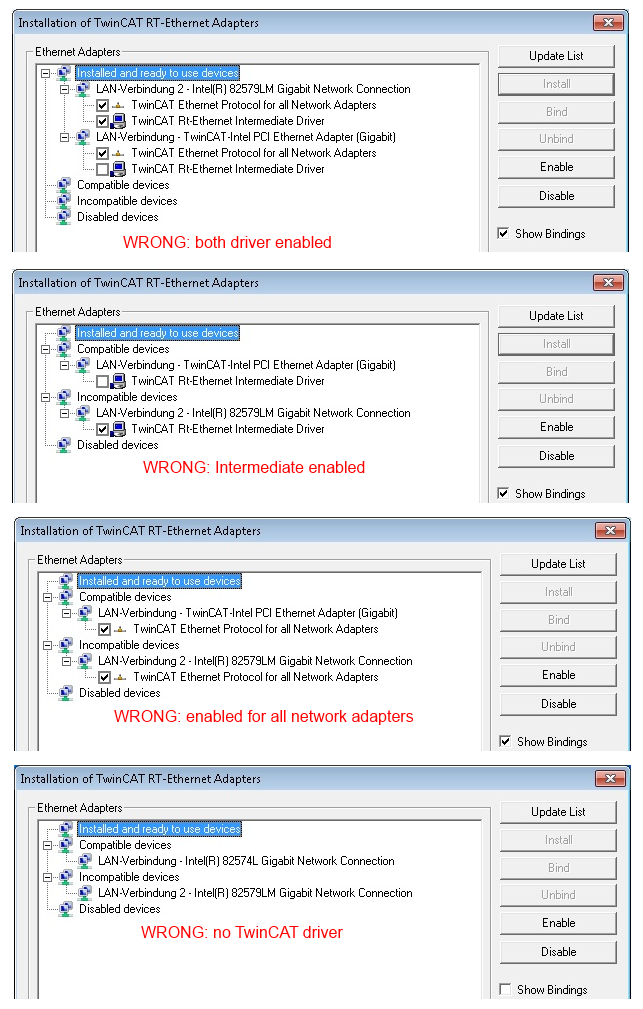 Fig.63: Wrong driver settings for the Ethernet port
Fig.63: Wrong driver settings for the Ethernet portIP address of the port used
 | IP address/DHCP In most cases an Ethernet port that is configured as an EtherCAT device will not transport general IP packets. For this reason and in cases where an EL6601 or similar devices are used it is useful to specify a fixed IP address for this port via the “Internet Protocol TCP/IP” driver setting and to disable DHCP. In this way the delay associated with the DHCP client for the Ethernet port assigning itself a default IP address in the absence of a DHCP server is avoided. A suitable address space is 192.168.x.x, for example. |
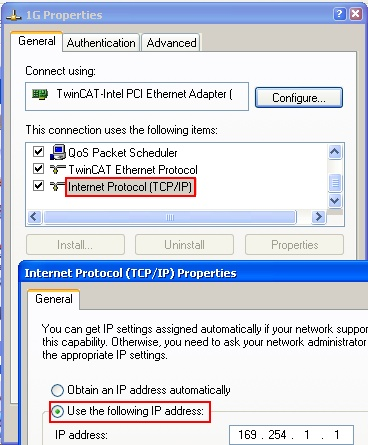 Fig.64: TCP/IP setting for the Ethernet port
Fig.64: TCP/IP setting for the Ethernet port