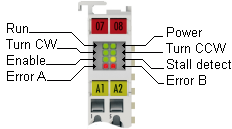
KL2531 - LED Displays
|
LED |
Display | |
|---|---|---|
|
Run (green) |
on |
Data transmission on the K-bus is active |
|
Turn CW (green) |
on |
Motor turns clockwise |
|
Enable (green) |
off |
Motor control is disabled (bit SB.0 is not set in the status byte) or KL2531 is not ready to operate |
|
on |
Motor control is disabled (bit SB.0 is set in the status byte) and KL2531 is ready to operate | |
|
Error A (red) |
flashes (1 Hz) |
Configuration error (bit SW.15 is set in the status word): |
|
Power (green) |
off |
Supply voltage (24VDC) not available or |
|
on |
Supply voltage (24VDC) is available | |
|
Turn CCW (green) |
on |
Motor turns counterclockwise |
|
Stall detect (yellow) |
on |
Motor control is disabled (bit SB.0 is not set in the status byte) |
|
flashes (1 Hz) |
The current load angle (SB.3 to SB.1) is greater than the configured load angle threshold (R47). | |
|
Error B (red) |
flashes (1 Hz) |
Supply or load error Supply voltage (24 VDC) too low (bit SW.9 in the status word is set) |