EtherCAT Distributed Clocks - coupling of EtherCAT systems
An EtherCAT system with distributed clock functionality has the following properties:
- the controller/IPC uses one Ethernet port
Note: for cable redundancy two Ethernet ports are used. However, the combination of distributed clocks (DC) and cable redundancy is only possible with device CU2508, see associated device documentation. - up to 65535 slaves are cyclically/acyclically supplied with process data at this port by a real-time EtherCAT master.
- the first DC-capable EtherCAT slave in the system represents the ReferenceClock (Fig. Distributed clocks system topology: "M"), to which all subsequent slaves are synchronized (Fig. Distributed clocks system topology: "S")
- in order to keep the real-time synchronous with the DC environment, the internal TwinCAT real-time clock is also synchronized with this field ReferenceClock.
A TwinCAT controller can therefore contain only one reference clock, which synchronizes the TwinCAT real-time. All other EtherCAT systems must readjust themselves or their local ReferenceClock. Nevertheless, all EtherCAT systems retain their local ReferenceClock in the first DC EtherCAT slave. This should be taken into account in the following settings.
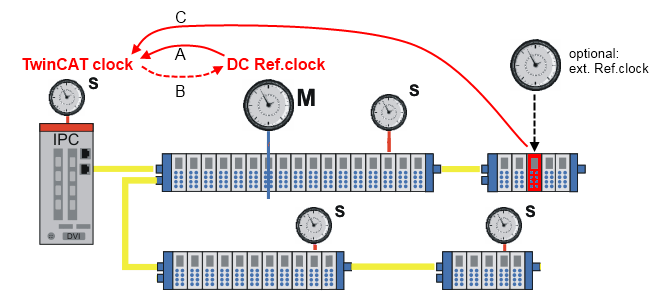 Fig.293: Distributed clocks system topology
Fig.293: Distributed clocks system topologyThe synchronization direction can be set in the advanced settings of the EtherCAT master.
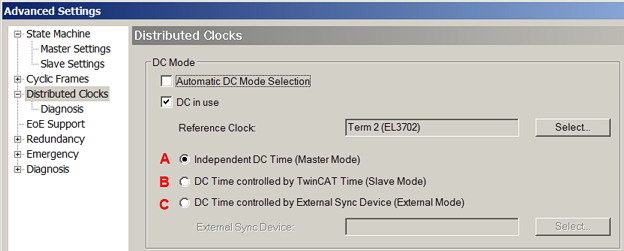 Fig.332: Synchronization direction
Fig.332: Synchronization directionIf more than one EtherCAT system is used in a TwinCAT control system, i.e. if the I/O configuration contains more than one “EtherCAT device” and some or all of these use distributed clocks functions, proceed as follows:
- a system is set to "Independent mode" in the DC settings.
In this system, a ReferenceClock is located in a slave and readjusts all other slaves in this system. The TwinCAT real-time of this clock is also synchronized based on frequency. - all other DC systems should be set to "Slave Mode".
These systems also contain the local ReferenceClocks for synchronizing the subsequent devices. However, during the EtherCAT startup and subsequently this ReferenceClock is itself synchronized based on the TwinCAT time and is referred to as "tracking reference clock".
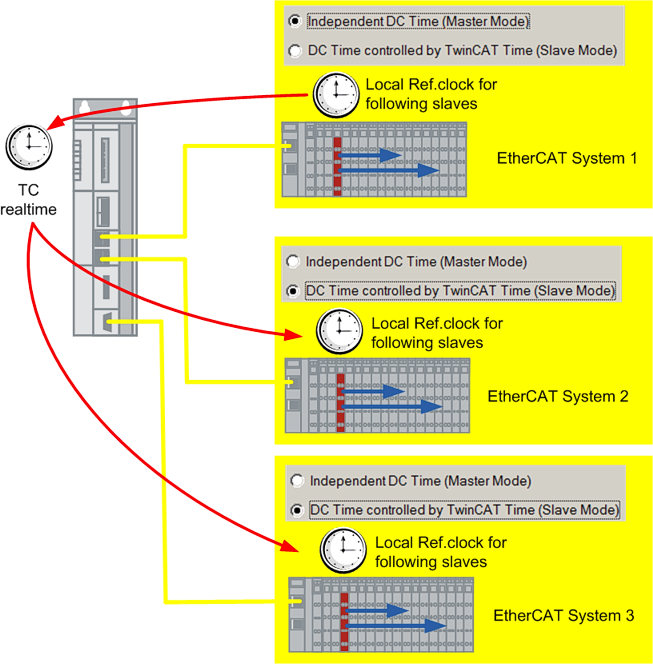 Fig.333: DC-coupling of EtherCAT systems
Fig.333: DC-coupling of EtherCAT systems | Notes
|
Tracking accuracy
As can be seen in Fig. DC-coupling of EtherCAT systems, a chain of synchronizations must be executed via the TwinCAT controller through to the "tracking reference clock". The control accuracy of the EtherCAT systems among each other that can be achieved in this way is reduced. The user needs to check whether this approach meets the long-term requirements of the application in terms of control accuracy and stability.
The CU2508 port multiplier has been developed for maximum synchronization accuracy. It supports up to 8 connected EtherCAT systems or 4 with simultaneous cable redundancy. It also enables the combination of distributed clock function and cable redundancy. The configuration of the CU2508 is transparent, i.e. the configuration may still contain independent EtherCAT devices.
For further information please refer to the CU2508 documentation.
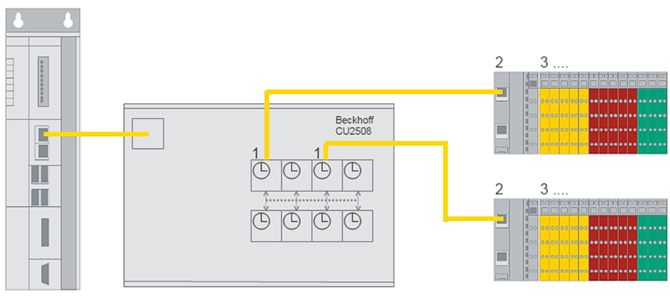 Fig.334: EtherCAT topology with CU2508 and 2 EtherCAT systems
Fig.334: EtherCAT topology with CU2508 and 2 EtherCAT systems