Representation of an EtherCAT slave on PROFINET
This section is intended to help explain the description of EtherCAT devices on another fieldbus system and to obtain the corresponding information from the existing EtherCAT documentation. In the following terms are explained for a better understanding.
• Introduction
EtherCAT devices such as EL terminals (ES, ELX, ELM), EP modules (ER, EQ, EPP) are EtherCAT slave devices that always consist of process data and, if necessary, parameter data. As a rule, digital EtherCAT devices have no configuration data. Complex EtherCAT devices usually always.
• Process data (PDO, process data object)
Almost all EtherCAT devices have process data1) that can be from 2 bits and up to several 100 bytes in size. With complex EtherCAT devices, different structures and process data sizes can also be specified. These are so-called Predefined PDOs.
The Predefined PDOs must be specified by the EtherCAT (EC) Master and must be known or set here when the EC Master is started. There is always a Default Predefined PDO. Depending on the higher-level bus system used, the PDO mapping can be set on the EC coupler via the higher-level fieldbus system (as with PROFINET or PROFIBUS) or a configuration page (http protocol, as with ModbusTCP or EtherNet/IP).
1) Except for e.g. the EK1100 coupler, which has neither process data nor configuration data, it is equipped with an EtherCAT ASIC and is therefore also visible in the EtherCAT network without process data. |
Parameter data (COE)
The parameter data of an EC slave are transmitted via COE (CAN over EtherCAT). As with CAN, these are divided into objects, subobjects and data. Parameter data, for example, is data that sets the resistance value for an EL3202 terminal, i.e. a temperature resistance terminal, such as PT100, PT1000, NI100, etc.
Only the application-specific COE data is made available for the EK coupler. Depending on the superimposed bus system, all or only some COE objects can be accessed here.
Here, too, parameterization can take place via a website (http protocol) in the EC.
PROFINET
• Process data
PROFINET devices (Slaves) must bring a GSDML file with them. The devices are described in this GSDML. The EP9300-0022 is a device with a modular structure. It consists of a head station (EP9300-0022) and a number of EtherCAT devices that are connected to the EP9300-0022. This file (GSDML) must then be integrated into the PROFINET controller. If this has been done, the EP9300-0022 and the EtherCAT devices can now be integrated and the appropriate settings made.
Predefined PDOs usually consist of different PDOs and are a compilation of different PDOs of the process image.
This is illustrated below with the TwinCAT automation software:
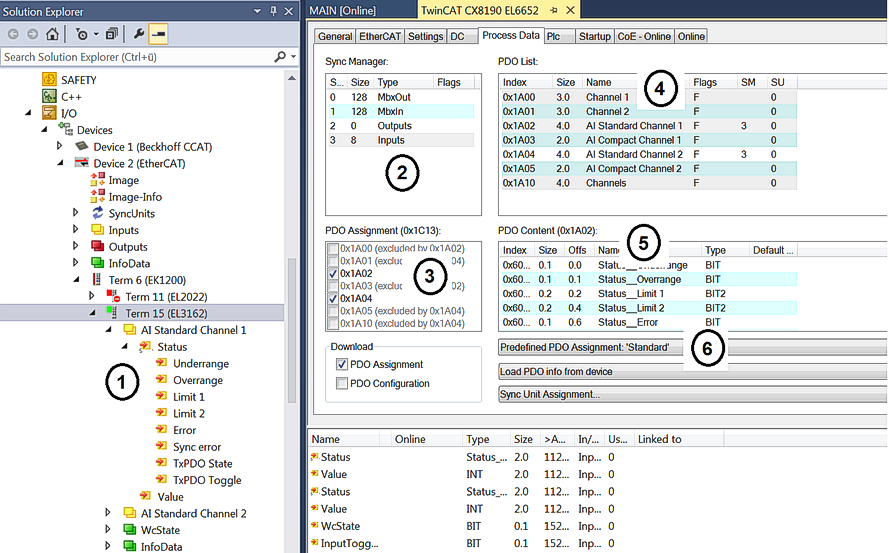
Legend:
- The EtherCAT Terminal is inserted in the TwinCAT tree and has process data that can be linked to the PLC program.
- View of the existing process data in bytes (exactly this number and size can be seen with PROFINET and the Siemens controller, Siemens does not display the process data in more detail although they are described in the GSDML)
- Display which PDOs are active in the process data
- View of all PDOs
- Detailed single PDOs which can be selected in "4”
- Predefined PDOs
In the GSDML, only the predefined PDOs can be selected (6). If a different combination of PDOs is required, this can only be done via a Beckhoff controller, such as the CX8093, which has a default PROFINET interface and can be programmed with TwinCAT 2 (TwinCAT 3 requires a CX9020 with B930 interface, or any Beckhoff controller with an EL6631-0010).
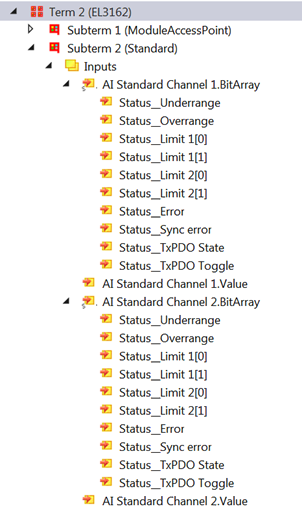
Name | Size (Variable) | Bit offset |
|---|---|---|
AI Standard Channel 1.BitArray | ||
Status_Underrange | BIT (BOOL) | 0.0 |
Status_Overrande | BIT (BOOL) | 0.1 |
Status_Limit_1[0] | BIT (BOOL) | 0.2 |
Status_Limit_1[0] | BIT (BOOL) | 0.3 |
Status_Limit_1[0] | BIT (BOOL) | 0.4 |
Status_Limit_1[0] | BIT (BOOL) | 0.5 |
Status_Error | BIT (BOOL) | 0.6 |
Status_Sync error | BIT (BOOL) | 1.5 |
Status_TxPDO State | BIT (BOOL) | 1.6 |
Status_TxPDO Toggle | BIT (BOOL) | 1.7 |
AI Standard Channel 1.Value | 16 BIT (INT) | 2.0..3.7 |
AI Standard Channel 2.BitArray | ||
Status_Underrange | BIT (BOOL) | 4.0 |
Status_Overrande | BIT (BOOL) | 4.1 |
Status_Limit_1[0] | BIT (BOOL) | 4.2 |
Status_Limit_1[0] | BIT (BOOL) | 4.3 |
Status_Limit_1[0] | BIT (BOOL) | 4.4 |
Status_Limit_1[0] | BIT (BOOL) | 4.5 |
Status_Error | BIT (BOOL) | 4.6 |
Status_Sync error | BIT (BOOL) | 5.5 |
Status_TxPDO State | BIT (BOOL) | 5.6 |
Status_TxPDO Toggle | BIT (BOOL) | 5.7 |
AI Standard Channel 2.Value | 16 BIT (INT) | 6.0..7.7 |
Parameter data
In the following, the parameter or configuration data will be explained. Most of the necessary configuration data is contained in the GSDML; Beckhoff uses the same names and meanings here as on the EtherCAT side, which is contained in the ESI file2) in the CoE description.
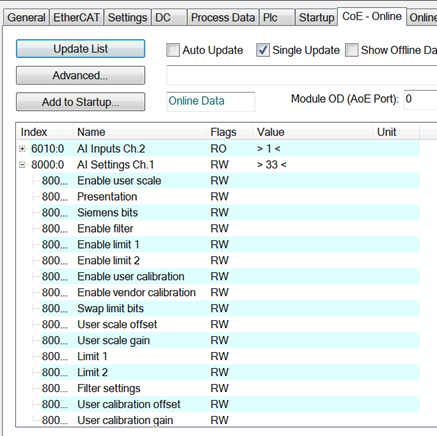
2) The ESI file is the description file for EtherCAT masters (ESI EtherCAT slave information). |
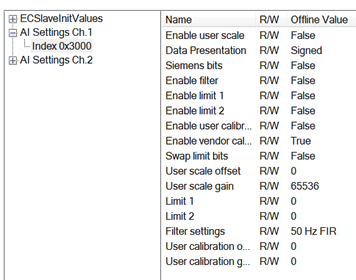
Parameter data of the EL3162 of the GSDML with TwinCAT
You will also find these parameters for the individual terminals in the configuration tool of your PROFINET controller, regardless of which vendor you use here. You can also access individual parameters acyclically via PROFINET and the Record Data. The PROFINET controller must have an interface to the Record Data for this.