Setting the controller parameters
Procedure:
- 1. Open the "CoE - Online" tab.
- 2. Set all parameters described below.
Leave all parameters not described in the factory setting.
(Detailed descriptions of the parameters can be found in the chapter Configuration objects.)
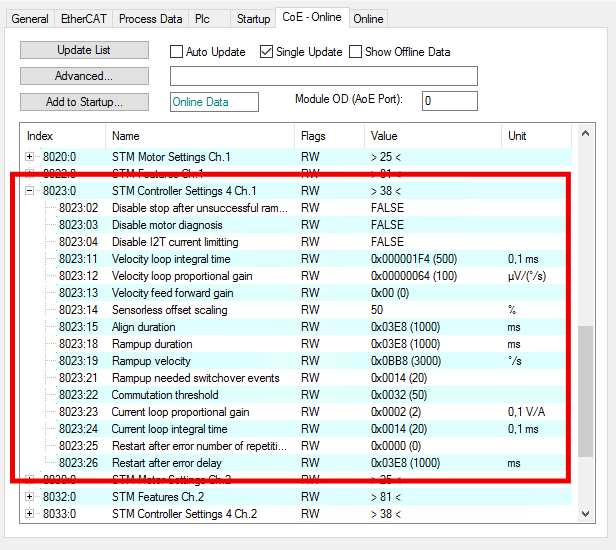
8023:03 “Disable motor diagnosis”
Set this parameter to TRUE. This disables the diagnosis feature during align phase.
8023:12 „Velocity loop proportional gain“
Set this parameter to zero. This disables the velocity controller. Reenable it after Step 4: Test run has been successfully completed.
8023:13 “Velocity feed forward”
Set this parameter to 100. This makes the target velocity value bypass the velocity controller.
8023:14 „Sensorless offset scaling“
Set this parameter to 80.
8023:19 “Rampup velocity”
Set this parameter to the same value as parameter 8020:09 “Start velocity”. Unit: °/s (degrees per second).
8023:21 "Rampup needed switchover events"
Set this parameter to 1.