Scan motor (only firmware 04 and higher)
The following parameters are determined when scanning the motor:
- The winding resistance of the motor: parameter 8020:04 "Phase to phase resistance".
- Controller parameters for the current controller:
- 8023:23 "Current loop proportional gain"
- 8023:24 "Current loop integral time"
Executing the scan
- Requirement: you have conscientiously set all parameters in the previous chapter Setting the motor parameters.
- 1. Open the "CoE - Online" tab and check the "Auto Update" checkbox.
- 2. Write one of the following values into parameter 0xFB00:01 "Request":
Value 0x8007 for channel 1.
Value 0x8017 for channel 2.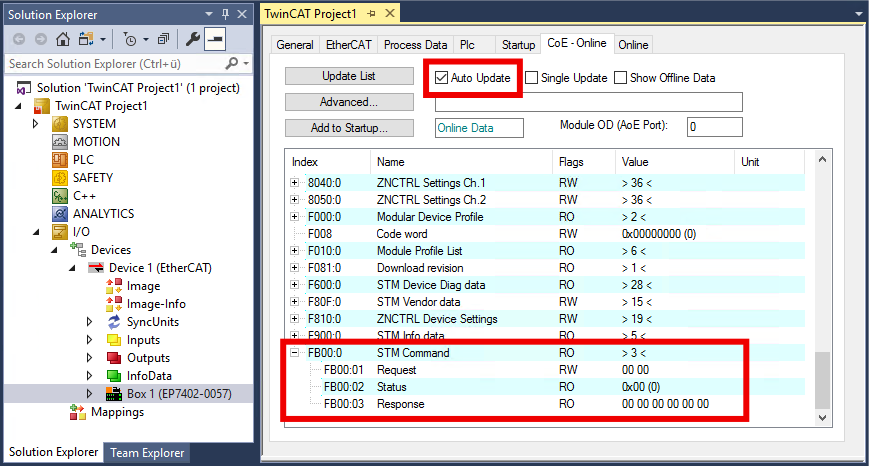
- The scan will be executed.
- The value of register FB00:02 "Status" indicates the progress of the scan.
The values 100dec ... 200dec correspond to 0 ... 100 %. - 3. Wait until register FB00:02 "Status" assumes the value 0 or 3.
- Value 0: the scan was successful.
- Value 3: error. See troubleshooting.
Troubleshooting
If an error occurs during the scan, an error code is output in parameter FB00:03 "Response". The following table shows the possible error codes:
Response | Meaning and remedy |
|---|---|
03 00 00 00 00 01 | Make sure that the following bits of both channels have the correct value:
|
03 00 00 00 00 02 | Make sure that the bit "Ready to enable" has the value 1. |
03 00 00 00 00 03 | An internal error has occurred. See also diagnostic bit General hardware error. |
03 00 00 00 00 04 | The scan could not be performed successfully. Check that the motor is connected correctly and that the motor shaft can rotate freely. |
An error does not have to be acknowledged. If a scan was aborted with an error message, you can simply start a new scan.