CSP
Position control
CSP is the abbreviation for "Cyclic synchronous position".
A defined target position can be set via the "Target position" variable.
With the settings for the CSP operation mode, the terminal internally calculates the control loops for current, velocity and position. The NC calculates the setpoint for the position and transfers it to the terminal.
Following error monitor
In the factory setting, following error monitor is active in the operation mode CSP. In all other operation modes the following error monitor is not used and is ignored.
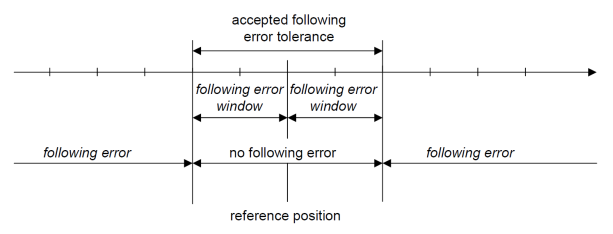
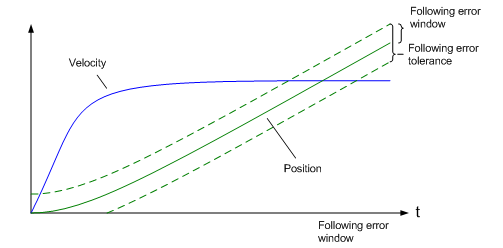
- The window of the following error monitor can be adjusted with the Following error window (Index 0x8n10:50). The value set here – multiplied by the scaling factor – specifies by what position the actual position may differ from the set position, positively and negatively. The total accepted tolerance is thus twice as large as the position entered in the Following error window (see fig. Following error window).
- The time (in ms) allowed for a following error timeout can be set with the Following error time out (Index 0x8n10:51). As soon as the target position is exceeded by more than the position entered in the Following error window for the time entered in the Following error time out, the terminal outputs an error and stops immediately.
- The current following error can be read in the Following error actual value (Index 0x6n10:06).
The value 0xFFFFFF (-1) in the Following error window means that the following error monitor is switched off and corresponds to the delivery state.
The Following error time out is 0x0000 (0) on delivery.