Homing
(Master TwinCAT 2.11 R3)
The data given here serve as an example for a servomotor type AM8131-0F20-0000 from Beckhoff Automation. For other motors the values may vary, depending on the application.
Table of contents |
|---|
Referencing
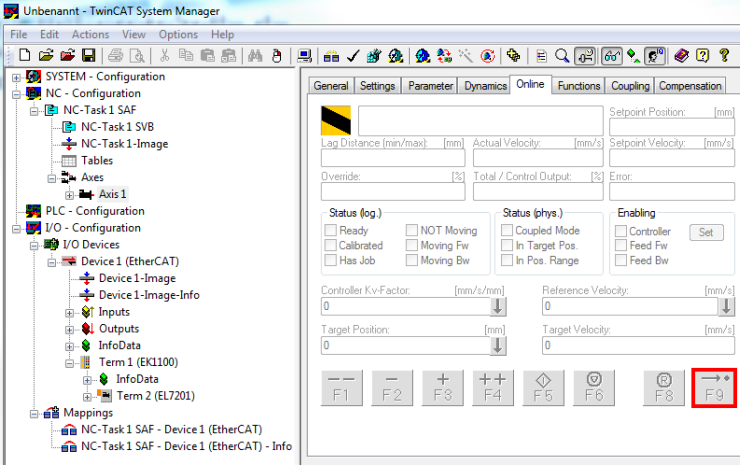
Referencing does not work via the online commissioning tab of the axis (see Fig. Online homing in the NC).
Function block "MC_Home"
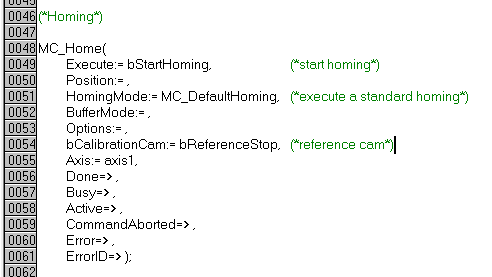
- Referencing must be done from the PLC. The function block MC_Home from the TC MC2 Lib is used for this purpose.
- The following minimum configuration is required in MC_Home.
- HomingMode enables selection of mode to be used for referencing.
- Execute is used to initiate homing.
- bCalibrationCam, which has to be linked with your reference cam, is used to stop homing.
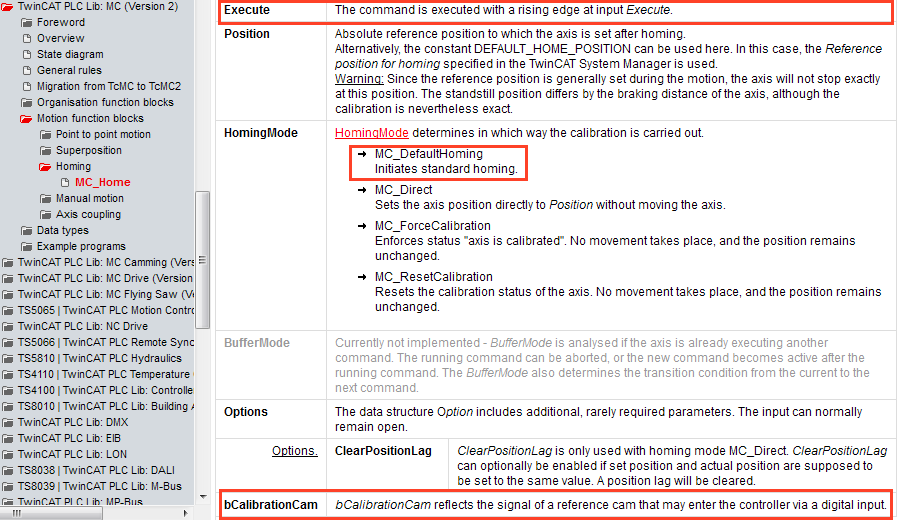
- The following figure Extract from the functional description for MC_Home shows an extract from the functional description of MC_Home. Full information can be found in the corresponding functional description.
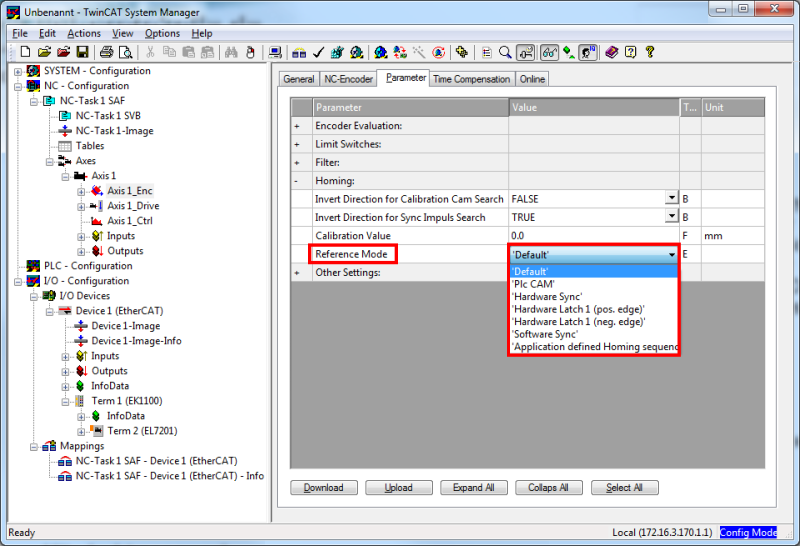
Reference modes
- The EL72x1-xxxx can be operated with the following NC reference modes (see Fig. Selection of the reference modes in the NC).
-
Default: Is suitable as a general setting and for most applications.
Once the motor reaches the reference cam, the direction is reversed. The declining cam signal causes the motor to stop. The reference position is then set. - Software Sync: The C track is modelled virtually.
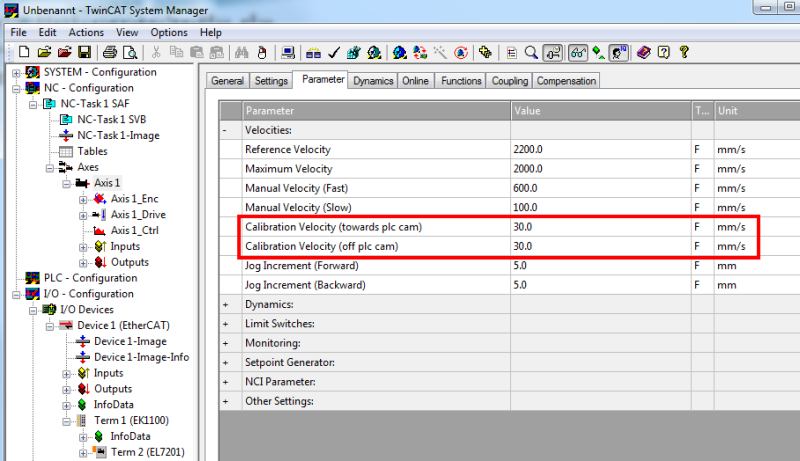
The velocity to be used for homing can also be set in the NC (Fig. Setting the reference velocity).