Process Data Objects (PDO)
Introduction
In many fieldbus systems the entire process image is continuously transferred - usually in a more or less cyclic manner. CANopen is not limited to this communication principle, since the multi-master bus access protocol allows CAN to offer other methods. Under CANopen the process data is not transferred in a master/slave procedure, but follows instead the producer-consumer model. In this model, a bus node transmits its data, as a producer, on its own accord. This might, for example, be triggered by an event. All the other nodes listen, and use the identifier to decide whether they are interested in this telegram, and handle it accordingly. These are the consumers.
The process data in CANopen is divided into segments with a maximum of 8 bytes. These segments are known as process data objects (PDOs). The PDOs each correspond to a CAN telegram, whose specific CAN identifier is used to allocate them and to determine their priority. Receive PDOs (RxPDOs) and transmit PDOs (TxPDOs) are distinguished, the name being chosen from the point of view of the device: an input/output module sends its input data with TxPDOs and receives its output data in the RxPDOs. This naming convention is retained in the TwinCAT System Manager.
Communication parameters
The PDOs can be given different communication parameters according to the requirements of the application. Like all the CANopen parameters, these are also available in the device's object directory, and can be accessed by means of the service data objects. The parameters for the receive PDOs are at index 0x1400 (RxPDO1) onwards. There can be up to 512 RxPDOs (ranging up to index 0x15FF). In the same way, the entries for the transmit PDOs are located from index 0x1800 (TxPDO1) to 0x19FF (TxPDO512).
The Beckhoff Bus Couplers or Fieldbus Coupler Box modules make 16 RxPDO and TxPDOs available for the exchange of process data (although the figure for Economy and LowCost BK5110 and LC5100 Couplers and the Fieldbus Boxes is 5 PDOs each, since these devices manage a lower quantity of process data). The FC510x CANopen master card supports up to 192 transmit and 192 receive PDOs for each channel - although this is restricted by the size of the DPRAM. The EL6751 CANopen terminal dynamically organizes the process image; i.e. the process data are written in succession, enabling a higher data transmission rate. Up to 32 TxPDOs and 32 RxPDOs can be handled in slave mode.
For each existing process data object there is an associated communication parameter object. The TwinCAT System Manager automatically assigns the set parameters to the relevant object directory entries. These entries and their significance for the communication of process data are explained below.
PDO Identifier
The most important communication parameter in a PDO is the CAN identifier (also known as the communication object identifier, or COB-ID). It is used to identify the data, and determines their priority for bus access. For each CAN data telegram there may only be one sender node (producer), although all messages sent in the CAN broadcast procedure can be received, as described, by any number of nodes (consumers). Thus a node can make its input information available to a number of bus devices at the same time - even without transferring them through a logical bus master. The identifier is located in sub-index 1 of the communication parameter set. It is coded as a 32-bit value in which the least significant 11 bits (bits 0...10) contain the identifier itself. The data width of the object of 32 bits also allows 29-bit identifiers in accordance with CAN 2.0B to be entered, although the default identifiers always refer to the more usual 11-bit versions. Generally speaking, CANopen is economical it its use of the available identifiers, so that the use of the 29-bit versions remains limited to unusual applications. It is therefore also not supported by a Beckhoff's CANopen devices. The highest bit (bit 31) can be used to activate the process data object or to turn it off.
A complete identifier list is provided in the appendix.
PDO linking
In the system of default identifiers, all the nodes (here: slaves) communicate with one central station (the master), since slave nodes do not listen by default to the transmit identifier of any other slave node.
 Fig.109: Default identifier allocation: Master/Slave
Fig.109: Default identifier allocation: Master/Slave Fig.110: PDO linking: Peer to Peer
Fig.110: PDO linking: Peer to PeerIf the consumer-producer model of CANopen PDOs is to be used for direct data exchange between nodes (without a master), the identifier allocation must be appropriately adapted, so that the TxPDO identifier of the producer agrees with the RxPDO identifier of the consumer: This procedure is known as PDO linking. It permits, for sample, easy construction of electronic drives in which several slave axes simultaneously listen to the actual value in the master axis TxPDO.
PDO Communication Types: Overview
CANopen offers a number of possible ways to transmit process data (see also: Notes on PDO Parameterization).
 Fig.111: Diagram: CAN process data transmission
Fig.111: Diagram: CAN process data transmissionEvent driven
The ”event" is the alteration of an input value, the data being transmitted immediately after this change. The event-driven flow can make optimal use of the bus bandwidth, since instead of the whole process image it is only the changes in it that are transmitted. A short reaction time is achieved at the same time, since when an input value changes it is not necessary to wait for the next interrogation from a master.
As from CANopen Version 4 it is possible to combine the event driven type of communication with a cyclic update. Even if an event has not just occurred, event driven TxPDOs are sent after the event timer has elapsed. If an event does occur, the event timer is reset. For RxPDOs the event timer is used as a watchdog in order to monitor the arrival of event driven PDOs . If a PDO does not arrive within a set period of time, the bus node adopts the error state.
Polled
The PDOs can also be polled by data request telegrams (remote frames). In this way it is possible to get the input process image of event-driven inputs onto the bus, even when they do not change, for instance through a monitoring or diagnostic device brought into the network while it is running. The time behavior of remote frame and response telegrams depends on what CAN controller is in use. Components with full integrated message filtering ("FullCAN") usually answer a data request telegram immediately, transmitting data that is waiting in the appropriate transmit buffer - it is the responsibility of the application to see that the data there is continuously updated. CAN controllers with simple message filtering (BasicCAN) on the other hand pass the request on to the application which can now compose the telegram with the latest data. This does take longer, but does mean that the data is up-to-date. Beckhoff use CAN controllers following the principle of Basic CAN.
Since this device behavior is usually not transparent to the user, and because there are CAN controllers still in use that do not support remote frames at all, polled communication can only with reservation be recommended for operative running.
Synchronized
It is not only for drive applications that it is worthwhile to synchronize the determination of the input information and the setting the outputs. For this purpose CANopen provides the SYNC object, a CAN telegram of high priority but containing no user data, whose reception is used by the synchronized nodes as a trigger for reading the inputs or for setting the outputs.
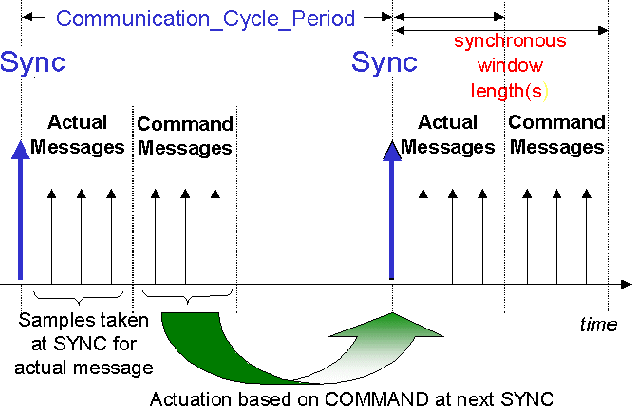 Fig.112: Diagram: CAN "SYNC" telegram
Fig.112: Diagram: CAN "SYNC" telegramPDO transmission types: Parameterization
The PDO transmission type parameter specifies how the transmission of the PDO is triggered, or how received PDOs are handled.
|
Transmission type |
Cyclical |
Acyclical |
Synchronous |
Asynchronous |
Only RTR |
|---|---|---|---|---|---|
|
0 |
|
X |
X |
|
|
|
1-240 |
X |
|
X |
|
|
|
241-251 |
- reserved - | ||||
|
252 |
|
|
X |
|
X |
|
253 |
|
|
|
X |
X |
|
254, 255 |
|
|
|
X |
|
The type of transmission is parameterized for RxPDOs in the objects at 0x1400ff, sub-index 2, and for TxPDOs in the objects at 0x1800ff, sub-index 2.
Acyclic Synchronous
PDOs of transmission type 0 function synchronously, but not cyclically. An RxPDO is only evaluated after the next SYNC telegram has been received. In this way, for instance, axis groups can be given new target positions one after another, but these positions only become valid at the next SYNC - without the need to be constantly outputting reference points. A device whose TxPDO is configured for transmission type 0 acquires its input data when it receives the SYNC (synchronous process image) and then transmits it if the data correspond to an event (such as a change in input) having occurred. Transmission type 0 thus combines transmission for reasons that are event driven with a time for transmission (and, as far as possible, sampling) and processing given by the reception of "SYNC".
Cyclic Synchronous
In transmission types 1-240 the PDO is transmitted cyclically: after every ”nth" SYNC (n = 1...240). Since transmission types can be combined on a device as well as in the network, it is possible, for example, for a fast cycle to be agreed for digital inputs (n = 1), whereas the data for analog inputs is transmitted in a slower cycle (e.g. n = 10). RxPDOs do not generally distinguish between transmission types 0...240: a PDO that has been received is set to valid when the next SYNC is received. The cycle time (SYNC rate) can be monitored (object 0x1006), so that if the SYNC fails the device reacts in accordance with the definition in the device profile, and switches, for sample, its outputs into the error state.
The FC510x card / EL6751 terminal fully support the synchronous communication method: transmitting the SYNC telegram is coupled to the linked task, so that new input data is available every time the task begins. If a synchronous PDO does not arrive, this is detected and reported to the application.
Only RTR
Transmission types 252 and 253 apply to process data objects that are transmitted exclusively on request by a remote frame. 252 is synchronous: when the SYNC is received the process data is acquired. It is only transmitted on request. 253 is asynchronous. The data here is acquired continuously, and transmitted on request. This type of transmission is not generally recommended, because fetching input data from some CAN controllers is only partially supported. Because, furthermore, the CAN controllers sometimes answer remote frames automatically (without first requesting up-to-date input data), there are circumstances in which it is questionable whether the polled data is up-to-date. Transmission types 252 and 253 are for this reason not supported by the Beckhoff PC cards / terminals.
Asynchronous
The transmission types 254 + 255 are asynchronous, but may also be event-driven. In transmission type 254, the event is specific to the manufacturer, whereas for type 255 it is defined in the device profile. In the simplest case, the event is the change of an input value - this means that every change in the value is transmitted. The asynchronous transmission type can be coupled with the event timer, thus also providing input data when no event has just occurred.
Inhibit time
The ”inhibit time" parameter can be used to implement a ”transmit filter" that does not increase the reaction time for relatively new input alterations, but is active for changes that follow immediately afterwards. The inhibit time (transmit delay time) specifies the minimum length of time that must be allowed to elapse between the transmission of two of the same telegrams. If the inhibit time is used, the maximum bus loading can be determined, so that the worst case latency can then be found.
 Fig.113: Timing diagram: "Inhibit time"
Fig.113: Timing diagram: "Inhibit time"Although the Beckhoff FC510x PC cards / EL6751 terminal can parameterize the inhibit time on slave devices, they do not themselves support it. The transmitted PDOs become automatically spread out (transmit delay) as a result of the selected PLC cycle time - and there is little value in having the PLC run faster than the bus bandwidth permits. The bus loading, furthermore, can be significantly affected by the synchronous communication.
Event Timer
An event timer for transmit PDOs can be specified by sub-index 5 in the communication parameters. Expiry of this timer is treated as an additional event for the corresponding PDO, so that the PDO will then be transmitted. If the application event occurs during a timer period, it will also be transmitted, and the timer is reset.
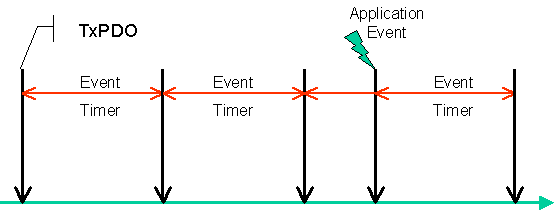 Fig.114: Time representation of the event timer
Fig.114: Time representation of the event timerIn the case of receive PDOs, the timer is used to set a watchdog interval for the PDO: the application is informed if no corresponding PDO has been received within the set period. The FC510x / EL6751 can in this way monitor each individual PDO.
PDO Mapping
PDO mapping refers to mapping of the application objects (real time data) from the object directory to the process data objects. The CANopen device profile provide a default mapping for every device type, and this is appropriate for most applications. Thus the default mapping for digital I/O simply represents the inputs and outputs in their physical sequence in the transmit and receive process data objects.
The default PDOs for drives contain 2 bytes each of a control and status word and a set or actual value for the relevant axis.
The current mapping can be read by means of corresponding entries in the object directory. These are known as the mapping tables. The first location in the mapping table (sub-index 0) contains the number of mapped objects that are listed after it. The tables are located in the object directory at index 0x1600ff for the RxPDOs and at 0x1A00ff for the TxPDOs.
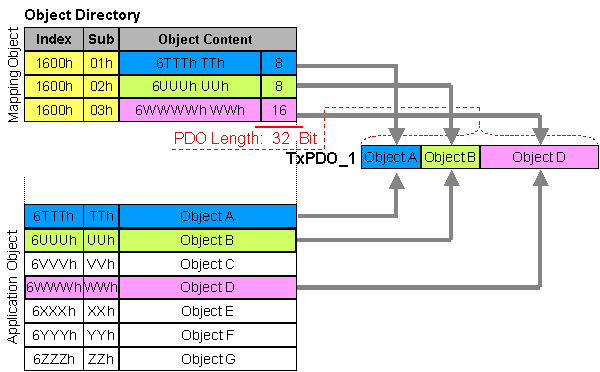 Fig.115: Mapping representation
Fig.115: Mapping representationDigital and analog input/output modules: Read out the I/O number
The current number of digital and analog inputs and outputs can be determined or verified by reading out the corresponding application objects in the object directory:
|
Parameter |
Object directory address |
|---|---|
|
Number of digital input bytes |
Index 0x6000, sub-index 0 |
|
Number of digital output bytes |
Index 0x6200, sub-index 0 |
|
Number of analog inputs |
Index 0x6401, sub-index 0 |
|
Number of analog outputs |
Index 0x6411, sub-index 0 |
Variable mapping
As a rule, the default mapping of the process data objects already satisfies the requirements. For special types of application the mapping can nevertheless be altered: the Beckhoff CANopen Bus Couplers, for instance, thus support variable mapping, in which the application objects (input and output data) can be freely allocated to the PDOs. The mapping tables must be configured for this: as from Version 4 of CANopen, only the following procedure is permitted, and must be followed precisely:
- First delete the PDO (set 0x1400ff, or 0x1800ff, sub-index 1, bit 31 to "1")
- Set sub-index 0 in the mapping parameters (0x1600ff or 0x1A00ff) to "0"
- Change mapping entries (0x1600ff or 0x1A00ff, SI 1..8)
- Set sub-index 0 in the mapping parameters to the valid value. The device then checks the entries for consistency.
- Create PDO by entering the identifier (0x1400ff or 0x1800ff, sub-index 1).
Dummy Mapping
A further feature of CANopen is the mapping of placeholders, or dummy entries. The data type entries stored in the object directory, which do not themselves have data, are used as placeholders. If such entries are contained in the mapping table, the corresponding data from the device is not evaluated. In this way, for instance, a number of drives can be supplied with new set values using a single CAN telegram, or outputs on a number of nodes can be set simultaneously, even in event-driven mode.